Ronald J. Anderson - Introduction to Mechanical Vibrations
Здесь есть возможность читать онлайн «Ronald J. Anderson - Introduction to Mechanical Vibrations» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Introduction to Mechanical Vibrations
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Introduction to Mechanical Vibrations: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Introduction to Mechanical Vibrations»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
is a definitive resource. The text extensively covers foundational knowledge in the field and uses it to lead up to and include: finite elements, the inerter, Discrete Fourier Transforms, flow-induced vibrations, and self-excited oscillations in rail vehicles.
The text aims to accomplish two things in a single, introductory, semester-length, course in vibrations. The primary goal is to present the basics of vibrations in a manner that promotes understanding and interest while building a foundation of knowledge in the field. The secondary goal is to give students a good understanding of two topics that are ubiquitous in today's engineering workplace – finite element analysis (FEA) and Discrete Fourier Transforms (the DFT- most often seen in the form of the Fast Fourier Transform or FFT). FEA and FFT software tools are readily available to both students and practicing engineers and they need to be used with understanding and a degree of caution. While these two subjects fit nicely into vibrations, this book presents them in a way that emphasizes understanding of the underlying principles so that students are aware of both the power and the limitations of the methods.
In addition to covering all the topics that make up an introductory knowledge of vibrations, the book includes:
● End of chapter exercises to help students review key topics and definitions
● Access to sample data files, software, and animations via a dedicated website
Introduction to Mechanical Vibrations — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Introduction to Mechanical Vibrations», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
1.1.3.3 Generalized Forces
The generalized force,  , associated with the generalized coordinate,
, associated with the generalized coordinate,  , accounts for the effect of externally applied forces that are not included in the potential energy. We normally include elastic (i.e. spring) forces and gravitational forces in the potential energy and all others enter through the use of generalized forces.
, accounts for the effect of externally applied forces that are not included in the potential energy. We normally include elastic (i.e. spring) forces and gravitational forces in the potential energy and all others enter through the use of generalized forces.
Given a three‐dimensional applied force
(1.24) 
with a position vector
(1.25) 
relative to a fixed point, we define the right‐hand side of Lagrange's Equation for generalized coordinate  to be the generalized force ,
to be the generalized force ,  , where
, where
(1.26) 
The two most common methods for finding the generalized forces are as follows.
1 The formal methodThe most formal approach, and one that always works, starts with the vector expression of the absolute position of the point of application of the forceand then writes the generalized force as(1.27) Equation 1.27 can be written for each of applied forces and the resulting scalar generalized forces can be added together to give the total generalized force for generalized coordinate as(1.28)
2 The intuitive approachLet there be generalized coordinates specifying the position of a force acting on a dynamic system in Cartesian Coordinates. The force will be acting at the point where the coordinates , and are functions of the generalized coordinates through and of time, , as follows(1.29) Variations in the position of the force as the generalized coordinates are varied while time is held constant can be written as(1.30) If we are trying to find the generalized force corresponding to only one of the generalized coordinates, say , we rewrite Equation 1.30 with and , giving(1.31) Now consider Equation 1.26with each side multiplied by (1.32) The terms from Equation 1.31 can be substituted into the right‐hand side of Equation 1.32 to yield(1.33) The right‐hand side of Equation 1.33 can be seen to be the work done by the applied force as its position varies due to changes in the generalized coordinate while all other generalized coordinates and time are held constant.Using the intuitive approach to finding generalized forces, the analyst will consider, in sequence, the variation of individual generalized coordinates and will write expressions for the total work done during each variation. The generalized force associated with each generalized coordinate will be the work done during the variation of that coordinate, , divided by the variation in the coordinate. That is,(1.34)
1.1.3.4 Dampers – Rayleigh's Dissipation Function
Devices called “dampers” are common in mechanical systems. These are elements that dissipate energy and they are modeled as producing forces that are proportional to their rate of change of length. The rate of change of length is the relative velocity across the damper. “Proportional” implies linearity and a force proportional to speed implies laminar, viscous flow. As a result, these elements are often referred to as “linear viscous dampers”.
Figure 1.4shows a system where a body is attached to ground by a damper. The body is moving to the right with speed  and the damping coefficient (constant of proportionality) is
and the damping coefficient (constant of proportionality) is  . The physical connection of the damper to both the ground and the body dictates that the rate of change of length of the damper is equal to the speed
. The physical connection of the damper to both the ground and the body dictates that the rate of change of length of the damper is equal to the speed  . The force in the damper will therefore be
. The force in the damper will therefore be  . The direction of the force will be such that it causes the damper to increase in length as shown in the lower part of Figure 1.4. By Newton's 3rd Law, the force on the body must be equal and opposite to the force acting on the damper. The force
. The direction of the force will be such that it causes the damper to increase in length as shown in the lower part of Figure 1.4. By Newton's 3rd Law, the force on the body must be equal and opposite to the force acting on the damper. The force  therefore acts to the left on the body. In other words, the damping force opposes the velocity of the body.
therefore acts to the left on the body. In other words, the damping force opposes the velocity of the body.
Consider now the more general case of a particle where the velocity of the body is given by
(1.35) 
Given this velocity, the force that the damper applies to the particle will be
(1.36) 
The components of  can be substituted into Equation 1.26to get the following expression for the generalized force arising from the damper
can be substituted into Equation 1.26to get the following expression for the generalized force arising from the damper
(1.37) 
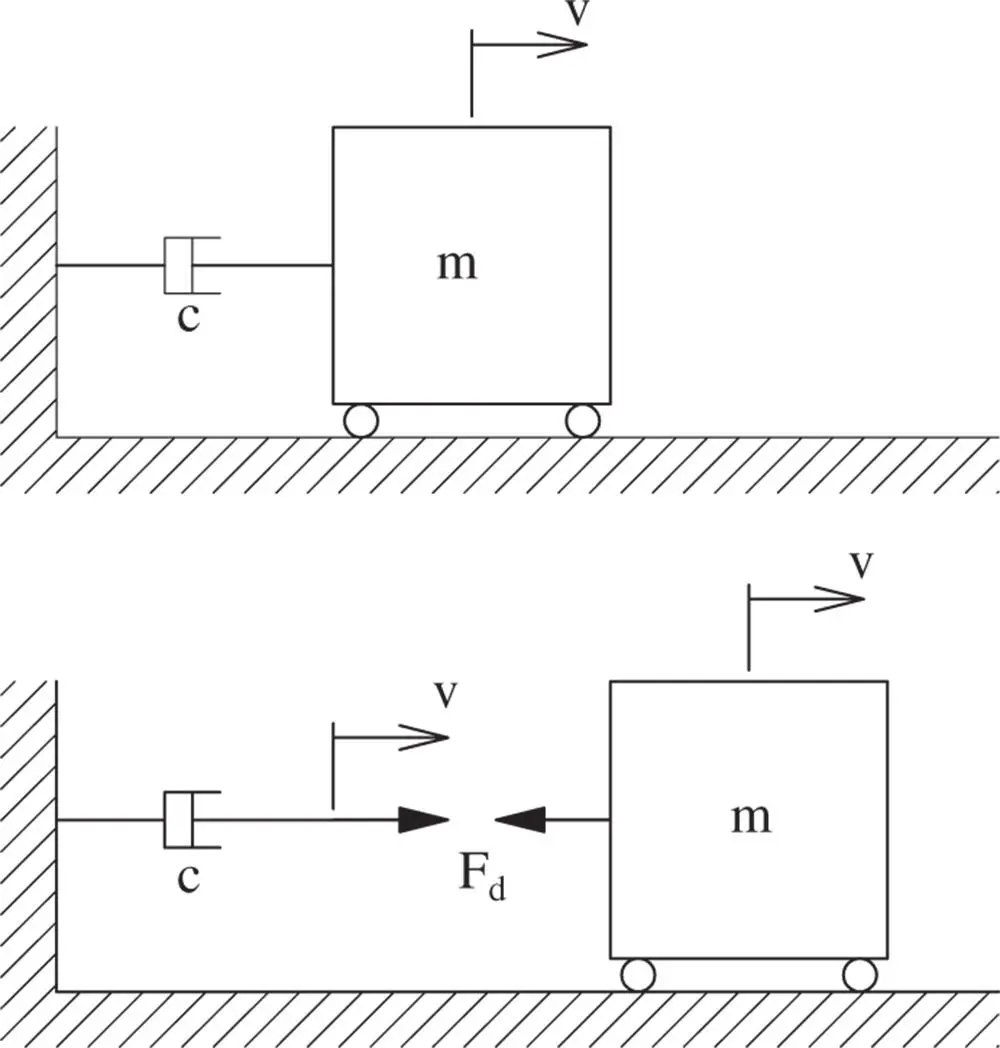
Figure 1.4 A linear viscous damper.
where we can write 4
(1.38) 
which can be substituted into Equation 1.37to yield the following expression for the generalized force
(1.39) 
The generalized force, as expressed in Equation 1.39, can be derived from a scalar function called Rayleigh's Dissipation Function which is defined as
(1.40) 
Интервал:
Закладка:
Похожие книги на «Introduction to Mechanical Vibrations»
Представляем Вашему вниманию похожие книги на «Introduction to Mechanical Vibrations» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.








Обсуждение, отзывы о книге «Introduction to Mechanical Vibrations» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.