Ronald J. Anderson - Introduction to Mechanical Vibrations
Здесь есть возможность читать онлайн «Ronald J. Anderson - Introduction to Mechanical Vibrations» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Introduction to Mechanical Vibrations
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Introduction to Mechanical Vibrations: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Introduction to Mechanical Vibrations»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
is a definitive resource. The text extensively covers foundational knowledge in the field and uses it to lead up to and include: finite elements, the inerter, Discrete Fourier Transforms, flow-induced vibrations, and self-excited oscillations in rail vehicles.
The text aims to accomplish two things in a single, introductory, semester-length, course in vibrations. The primary goal is to present the basics of vibrations in a manner that promotes understanding and interest while building a foundation of knowledge in the field. The secondary goal is to give students a good understanding of two topics that are ubiquitous in today's engineering workplace – finite element analysis (FEA) and Discrete Fourier Transforms (the DFT- most often seen in the form of the Fast Fourier Transform or FFT). FEA and FFT software tools are readily available to both students and practicing engineers and they need to be used with understanding and a degree of caution. While these two subjects fit nicely into vibrations, this book presents them in a way that emphasizes understanding of the underlying principles so that students are aware of both the power and the limitations of the methods.
In addition to covering all the topics that make up an introductory knowledge of vibrations, the book includes:
● End of chapter exercises to help students review key topics and definitions
● Access to sample data files, software, and animations via a dedicated website
Introduction to Mechanical Vibrations — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Introduction to Mechanical Vibrations», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
It remains to pick a suitable equilibrium state from the three we found in Sub section1.2.2. Of these, the most interesting is the one where the bead is not below or above point  . That is, consider the case where
. That is, consider the case where
With a little effort and use of one trigonometric identity, you can show that the linear equation of motion about this state can be written as
(1.63) 
As you will see later, this is the standard form for an undamped vibrational equation of motion. If the bead is in equilibrium and is disturbed away from equilibrium by a small angle, it will begin to oscillate with a frequency that can be determined directly from Equation 1.63. 9
1.3.2 Nonlinear Structural Elements
Making linear approximations to trigonometric functions is not the only consideration we have in creating linear differential equations of motion. Many times the physical properties of structural elements in the system are nonlinear. A rubber suspension element is a good example. Depending on how it is designed, it can be made to get softer or harder as it deflects. Note that “softer” and “harder” are non‐technical words relating to the stiffness of the element. Figure 1.6shows the characteristics of a “hardening” spring where the element gets stiffer as it deflects. The stiffness is measured by the local tangent to the curve.
The equilibrium solution to the nonlinear equation of motion will place the system in equilibrium at  (the point labeled operating point on Figure 1.6). Once there, we consider motions
(the point labeled operating point on Figure 1.6). Once there, we consider motions  away from the operating point and use a Taylor's Series expansion for the nonlinear function
away from the operating point and use a Taylor's Series expansion for the nonlinear function 
(1.64) 
For small values of  , we can neglect the higher order terms and write
, we can neglect the higher order terms and write
(1.65) 
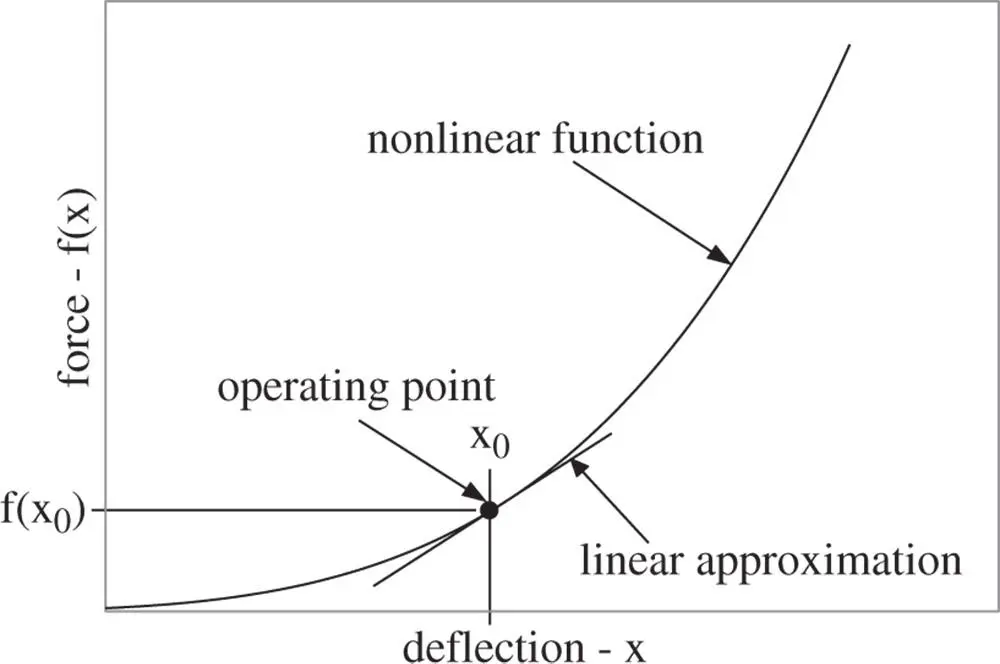
Figure 1.6 Nonlinear structural element – Linearization and effective stiffness.
where we can see that the linear term involves only the first derivative of the function. This derivative is the local tangent to the curve and is the effective stiffness of the element for this operating point. Linearization of functions about operating points is therefore an exercise in finding the local slope of the function and assuming that small deviations away from the operating point can be approximated by points lying on this straight line. The linear approximation is shown graphically in Figure 1.6.
The constant value of the force at the operating point  is the force acting at equilibrium and will enter the equation of motion in such a way that it and constant forces in other elements in the system will sum to zero. We consider these constant forces to be preloads on the elements and will quickly fall into the habit of leaving them out of the analysis because they always add up to zero.
is the force acting at equilibrium and will enter the equation of motion in such a way that it and constant forces in other elements in the system will sum to zero. We consider these constant forces to be preloads on the elements and will quickly fall into the habit of leaving them out of the analysis because they always add up to zero.
1.4 Summary
The study of Vibrations is the study of the behavior of dynamic systems as they experience small motions around stable equilibrium states. The steps in arriving at the governing equation 10of motion are
The nonlinear equations of motion for a system can be derived using either Newton's Laws or Lagrange's Equation.
The nonlinear equations of motion can be used to find equilibrium states for the system.
The degrees of freedom of the system can be replaced by their stable equilibrium values plus very small variables representing motions away from equilibrium.
The equations of motion can be linearized so that small motions about the stable equilibrium state are governed by linear, ordinary, differential equations.
Exercises
1 1.1 The figure shows an undeflected, nonlinear spring on the left and the same spring, now deflected by the weight of the hanging mass, on the right. Taking the coordinate, , as the deflection of the spring from its free length, the force in the spring can be expressed aswhere is in Newtons and is in meters.Figure E1.1What will be the equilibrium value of for a mass of 1200 kg?What is the effective stiffness of the system for small motions around the equilibrium in part (a)?Plot the force versus deflection curve for the element. Show the operating point and the linear approximation to be used in the equation of motion.
2 1.2 The figure shows the force/deflection characteristic for hardening springs used to support a large machine in a factory. The force (F in Newtons) written as a function of deflection (x in mm) isFour mounts of this type are placed under the four corners of the machine and deflect 3 mm as they take up the weight.Figure E1.2What effective stiffness does the system have about equilibrium?What is the mass of the machine?
3 1.3 The effective stiffness of any object that deflects under the action of a force can be expressed as the ratio of that force divided by the resulting deflection. In some cases, there are good theoretical expressions that can be used to get the effective stiffness. A good example is the effective stiffness of a uniform beam. Suppose you have two identical lightweight, uniform beams of length and flexural rigidity . One of the beams is cantilevered and the other is simply supported. You have a choice of supporting a heavy piece of equipment at the end of the cantilevered beam or at the center of the simply supported beam. Which support has a greater effective stiffness? What is the ratio of the two effective stiffnesses?
4 1.4 An open cylindrical container with a weight at its bottom is placed in the ocean. The cylinder sinks until buoyancy forces equal the total weight and then floats upright in equilibrium.Draw a FBD of the cylinder just after it is placed in the water. Use a DOF, , to indicate the distance the bottom of the cylinder has traveled below the free surface of the water. There will be a buoyancy force acting upward on the cylinder. This force is due to the water pressure a distance under the surface. That pressure is equal to where is the density of water and is the acceleration due to gravity. Assume a cross‐sectional area of for the cylinder.Use Newton's Laws to write the equation of motion for the cylinder.Find the equilibrium condition for the cylinder and solve for , the equilibrium value of .
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Introduction to Mechanical Vibrations»
Представляем Вашему вниманию похожие книги на «Introduction to Mechanical Vibrations» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.








Обсуждение, отзывы о книге «Introduction to Mechanical Vibrations» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.