Jürgen Handke - Humanoide Roboter
Здесь есть возможность читать онлайн «Jürgen Handke - Humanoide Roboter» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на немецком языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Humanoide Roboter
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Humanoide Roboter: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Humanoide Roboter»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Der deutsche Digital-Pionier Prof. Dr. Jürgen Handke, Leiter der Projekte H.E.A.R.T. und RoboPraX, zeigt in seinem einführenden Buch, wie humanoide Roboter gewinnbringend eingesetzt werden können, und diskutiert die verschiedenen Möglichkeiten der Nutzung durch uns Menschen: von einfachen Showcase-Anwendungen über den Einsatz als Partner in verschiedenen Lebensbereichen, speziell in der Bildung, bis hin zur Nutzung als Werkzeug zur Erlangung und Festigung digitaler Kompetenzen.
Humanoide Roboter — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Humanoide Roboter», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:

[V.I.11]
NAO „fühlt“
NAOs Kopf und Hände (bzw. Handrücken) sind mit jeweils drei taktilen Sensoren ausgestattet, die Berührungen registrieren. Auch seine Füße sind mit taktilen Sensoren (engl. Bumpers) ausgestattet. Darüber hinaus verfügt NAO in seiner Brust über jeweils zwei Ultraschallsender und -empfänger (= Sonar), mit denen er Entfernungen zu Objekten und Hindernissen erkennt. Damit kann er die Distanz zu Objekten in seiner Nähe bestimmen (Reichweite: 80 cm). Weitere Sensoren messen innere Zustände des Roboters, wie z.B. die Temperatur seiner Komponenten oder den Batteriestand.

[V.I.10]
Eine ganz besondere Art solcher taktiler Sensoren kommt von der österreichischen Firma Blue Danube Robotics, welche die sogenannte „Airskin“ erfunden hat. Dabei handelt es sich um taktile Sensoren, die auf verschiedenen Robotertypen, z.B. auf die EOAT (End of Arm Tooling) industrieller Robotern installiert werden können. AIRSKIN hat druckempfindliche und robuste Sensoren und durch diese Sensoren wird die Interaktion von Menschen und Roboter sicherer. So reagiert der Kollisionssensor z.B. bei einer Kollision zwischen Roboter und Mitarbeiter oder einem Objekt innerhalb von wenigen Millisekunden und veranlasst einen Not-Stopp. Außerdem dämpfen die weichen Pads die Kraftwirkungen, die bis zum völligen Stillstand der Maschine auftreten können. Die Installation der Sensoren ist nicht zuletzt auf Grund ihrer Flexibilität relativ unproblematisch.

Abb. I.13: Airskin im Einsatz
I.3 Einfache Humanoide Roboter
In den folgenden Abschnitten sollen einige ausgewählte, marktfertige und im Handel verfügbare humanoide Roboter im Detail vorgestellt werden. Bei diesen Robotern handelt es sich um kleine, extrem handliche Roboter, die z.T. sogar weniger als 40 cm groß sind, aber auch um größere Modelle, die mit 1,20 m Körpergröße dem Menschen in Punkto Körpergröße und Gewicht fast ebenbürtig sind.
[V.I.11]
Während die kleineren Modelle durch ihre Handlichkeit bestechen und nahezu keinerlei logistischen Aufwand benötigen, sind größere Modelle, allein schon aus Gründen der Transportproblematik, weniger flexibel einsetzbar. Wie sich Größe, Logistik und weitere Aspekte auf die Einsatzfähigkeit von humanoiden Robotern auswirken, ist Gegenstand der folgenden Kapitel.
Ein Tipp zur Namensgebung von Robotern
Einfache humanoide Roboter sind, was ihre körperlichen Merkmale angeht, in der Regel geschlechtsneutral. Das sollte sich auch in ihrer Namensgebung widerspiegeln, und es sollten geschlechtsspezifische Namen wie Max oder Emma vermieden werden. Darüber hinaus sollten Roboternamen so gewählt werden, dass sie sprachübergreifend ausgehend vom Schriftbild gleichermaßen ausgesprochen werden können und zudem aus einfachen offenen Silben bestehen. Namen wie YUKI oder CODY für die Roboter des Projekts H.E.A.R.T. erfüllen diese Kriterien par Excellence.
Poppy ist ein bi-pedaler, d.h. sich auf zwei Beinen bewegender, humanoider Roboter als Bausatz mit einem breiten Anwendungsspektrum. Primär wird Poppy für Testanwendungen in Bereichen der Mathematik, Robotik und Mechanik genutzt. Im Gegensatz zu anderen humanoiden Robotern besitzt Poppy anstelle von Gesichtsstrukturen einen LCD-Screen, über den er Ausdrücke seiner Emotionen anzeigen kann.

[V.I.12]
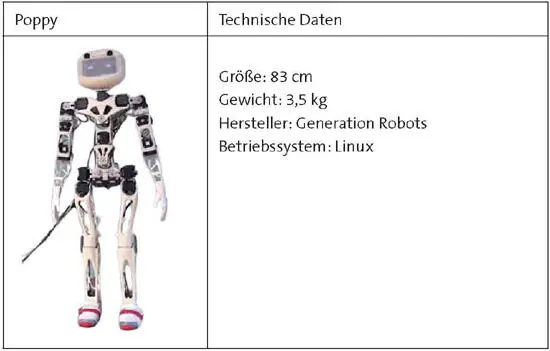
Abb. I.14: Poppy mit technischen Daten
Um mit Poppy zu kommunizieren ist die Nutzung der visuellen Programmierumgebung „Scratch“ oder die direkte Programmierung mit Python notwendig.9 Für den Austausch unter Programmierern gibt es mehrere Plattformen, u.a. eine Open-Source Python Bibliothek für vorgefertigte Anwendungen.

[V.I.13]
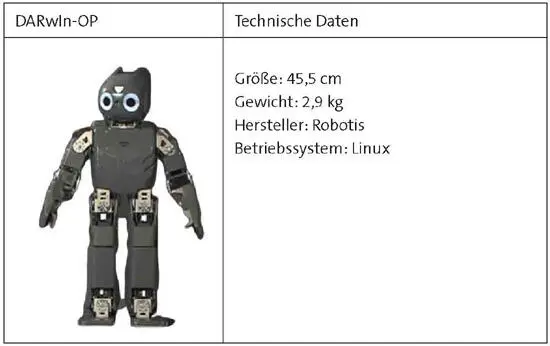
Abb. I.15: DARwIn-OP mit technischen Daten

[V.I.14]
DARwIn-OP ist ein humanoider Roboter mit Fokus auf angewandter Forschung und Lehre. Alle eingebauten Soft- und Hardwarekomponenten stehen unter einer Open-Source Lizenz. Programmiersprachen sind C++, Python, LabView, matlab oder Roboplus, die in-house Software von Robotis. Auch hier gibt es eine Entwickler-Plattform namens „robotsource“.
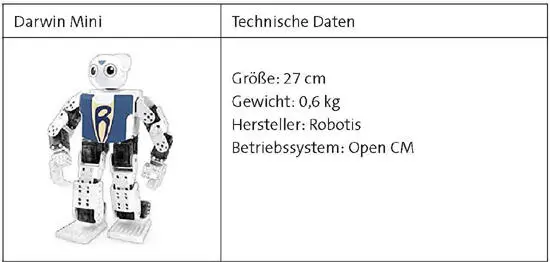
Abb. I.16: Darwin Mini mit technischen Daten
Darwin Mini ist ein über eine Android-App mittels Bluetooth steuerbarer Mini-Roboter. Er ist als Bausatz erhältlich, frei programmierbar und lässt sich ganz nach den Benutzerwünschen aufbauen.

[V.I.15]

Abb. I.17: Professor Einstein mit technischen Daten
Professor Einstein ist ein humanoider Unterhaltungsroboter, der auf individuelle Konversationen spezialisiert ist. Der Roboter ist in der Lage zu laufen, zu gestikulieren und vorhandene Gesichtsstrukturen für den Ausdruck von Emotionen zu nutzen. Die Roboter-Mensch Interaktion kann ebenso über Smart-Devices erfolgen, Voraussetzung dafür ist die Nutzung der „Stein-O-Matic App“.
I.3.1 SoftBank Robotics
Zwei humanoide Roboter haben mittlerweile anwendungsübergreifend eine große globale Verbreitung erreicht. Beide werden von der Firma SoftBank Robotics hergestellt und sind sowohl in der Forschung als auch im täglichen Einsatz sichtbar. Diese beiden Roboter, NAO und Pepper, werden in den folgenden Abschnitten detailliert vorgestellt.
I.3.1.1 NAO
NAO ist bereits seit 2006 als der erste humanoide Roboter aus dem Haus SoftBank Robotics verfügbar. Er ist 58 cm groß und verfügt über einen beweglichen Körper, der ihm eine relativ große Beweglichkeit ermöglicht. Sollte NAO einmal hinfallen, kann er problemlos wieder aufstehen. Das ermöglichen ihm viele einzelne Motoren in seinen Gelenken. Abb. I.18zeigt NAO mit seinen Bestandteilen.
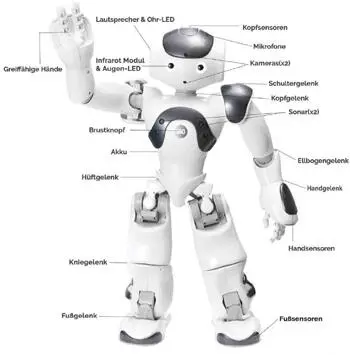
Abb. I.18: NAO und seine technischen Daten
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Humanoide Roboter»
Представляем Вашему вниманию похожие книги на «Humanoide Roboter» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Humanoide Roboter» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.