Jürgen Handke - Humanoide Roboter
Здесь есть возможность читать онлайн «Jürgen Handke - Humanoide Roboter» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на немецком языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Humanoide Roboter
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Humanoide Roboter: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Humanoide Roboter»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Der deutsche Digital-Pionier Prof. Dr. Jürgen Handke, Leiter der Projekte H.E.A.R.T. und RoboPraX, zeigt in seinem einführenden Buch, wie humanoide Roboter gewinnbringend eingesetzt werden können, und diskutiert die verschiedenen Möglichkeiten der Nutzung durch uns Menschen: von einfachen Showcase-Anwendungen über den Einsatz als Partner in verschiedenen Lebensbereichen, speziell in der Bildung, bis hin zur Nutzung als Werkzeug zur Erlangung und Festigung digitaler Kompetenzen.
Humanoide Roboter — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Humanoide Roboter», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
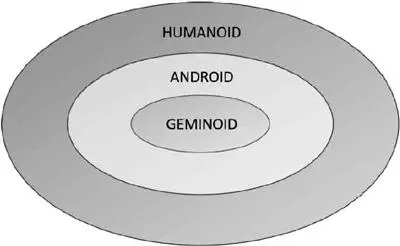
Abb. I.8: Humanoide Roboter
Bei Androiden und Geminoiden ist zu beachten, dass vollständige Originalgetreuheit auf dem aktuellen Stand von Technik und Wissenschaft für kein organisches Vorbild realisierbar ist. Der Eindruck des Künstlichen ist spätestens beim zweiten Hinsehen in der Regel nicht zu vermeiden, wie auch das Bild von „BuSaif“, dem an der United Arab Emirates University (UAEU) entwickelten Android zeigt ( Abb. I.9).

[V.I.2]
Der japanische Professor Masahiro Mori stellte in diesem Zusammenhang die Theorie auf, dass in solchen Situationen die anfängliche Empathie schnell in Abneigung umschlagen kann. Sobald Menschen ‚erkennen‘, dass der Roboter nicht menschlich ist, oder sich nicht wie ein Mensch verhält, sehen sie diesen als leblosen Körper oder ‚Zombie‘ an und wollen folglich Abstand halten. Mori begründet dieses Verhalten als Teil unseres Selbsterhaltungstriebes. Menschen haben während der Evolution gelernt, tote Körper zu meiden. Da diese menschliche Auffassung plötzlich von einem anfänglichen Höhepunkt abfallen kann, ist dieses Phänomen als „Uncanny Valley“ (dt. unheimliches Tal) bekannt.

Abb. I.9: BuSaif, der Android der UAEU
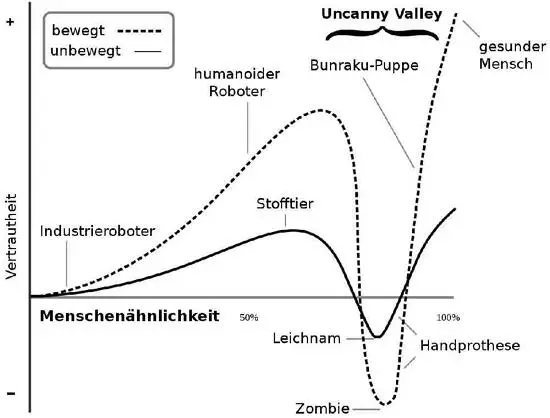
Abb. I.10: Das unheimliche Tal (engl. Uncanny Valley)
Mittlerweile gehen trotz des „Uncanny-Valley-Effekts“ viele Ingenieure und Designer auf die ursprüngliche Idee zurück, möglichst menschliche Roboter zu bauen.
So sind Androide, wie die in Abb. I.7gezeigte Gynoide „Nadine“, die man im Paderborner Heinz-Nixdorf Museum bestaunen kann, humanoide Roboter, welche das menschliche Aussehen genauer nachahmen und dabei versuchen, so menschlich wie möglich zu sein. Als weiteres Beispiel ist in Abb. I.11die Gynoide „Sophia“ aufgeführt, die schon vor den Vereinten Nationen gesprochen hat und der 2017 (wohl eher als Werbegag) die saudi-arabische Staatsangehörigkeit verliehen wurde.

Abb. I.11: Die Androidin (gynoid) „Sophia“
Geminoide, wie der in Abb. I.7gezeigte „Geminoid-DK“, ein ‚maschineller Klon‘ des dänischen Robotik-Spezialisten Hendrik Schärfe, werden gegenwärtig eher zu Forschungszwecken einsetzt. Der weltweit bekannteste Schöpfer solcher Geminoide ist Professor Hiroshi Ishiguro, der in Abb. I.12mit seinem fast identischen Ebenbild zu sehen ist.
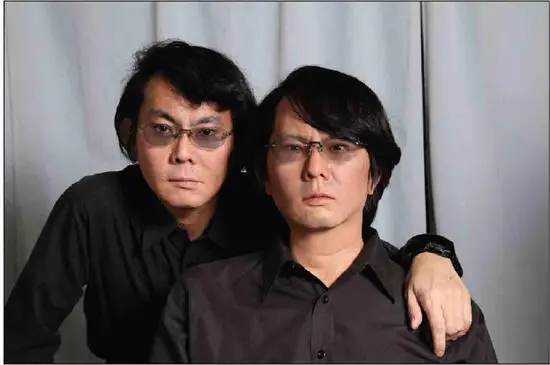
Abb. I.12: Professor Ishiguro (links) und sein Geminoid

[V.I.3]
Der „Geminoid-DK“
Professor Hendrik Schärfe hat einen Roboter, der ihm bis aufs Haar gleicht. Sein Name: „Geminoid-DK“ .
Er bewegt Kopf und Gesicht, blinzelt und lächelt wie ein Mensch. Sprechen kann er auch. Prof. Schärfe steuert sein zweites Ich per Tele-Operation, d.h. über USB-Kabel per Laptop, überträgt er seine Stimme per Lautsprecher. Die Lippen bewegen sich passend zu den Lauten. So verblüffend echt, dass der Professor seinen Zwilling sogar mal eine Vorlesung halten ließ. Einem Großteil der 150 Studenten soll das erst nach 45 Minuten gedämmert sein.
Für den dänischen Informatiker ein wichtiges Experiment: Denn er erforscht, wie Menschen auf Roboter reagieren. Schärfe glaubt: „Bald haben die meisten Menschen einen eigenen Roboter zu Hause. Da sollten wir wissen, mit welcher Maschine wir uns wohlfühlen.“
Noch ist das für einen Normal-Haushalt eher unerschwinglich: Derzeit sind 150.000 Euro, inklusive Labor-Ausrüstung für den Robo-Prof, der in den Laboren von Professor Ishiguro in Japan konstruiert wird, anzusetzen.
Die Beschaffenheit und der Erfolg der Mensch-Roboter-Interaktion sind stark abhängig vom Design und der Erscheinung des Roboters. Alle humanoiden Roboter sind so gebaut, dass sie dem menschlichen Körper ähneln, oder ihn komplett imitieren. Es wird vermutet, dass dies dabei hilft, eine erste Bindung mit den Menschen herzustellen. Während dieses Ziel näher rückt, steigen jedoch gleichzeitig die Erwartungen der Menschen an die Roboter. Diese können aber – wie in den Beispielen dieses Buches gezeigt wird – zum Großteil noch nicht erfüllt werden.
Zumeist entscheiden sich die Entwickler hinsichtlich der Vollständigkeit des zu bauenden Roboterkörpers bestimmte Komponenten der Vorbilder zu integrieren oder auch wegzulassen. Entsprechend wird der resultierende Körper bestimmte Eigenschaften und Fähigkeiten seiner Vorbilder besitzen, andere dagegen vermissen. Spielt beispielsweise Mobilität für den Roboter keine Rolle, werden Beine, Räder u. ä. nicht benötigt. Wenn der Roboter keine Gegenstände manipulieren oder kommunikative Gesten darstellen muss, können Arme und Hände in ihrer Beweglichkeit eingeschränkt werden oder man kann auf diese Gliedmaßen vollständig verzichten.
I.2.2 Die Fähigkeiten Humanoider Roboter
Viele Menschen denken beim Begriff „Roboter“ an Figuren aus Science-Fiction Filmen wie z.B. WALL-E, Transformers oder Star Wars. Die Roboter aus diesen Filmen besitzen meist vielfältige Fähigkeiten und sind fast menschlich, manchmal sogar übermenschlich. Dieses Bild entspricht jedoch nicht der heutigen Realität. Humanoide Roboter können nicht ohne Menschen denken oder handeln. Eine Programmierung durch Menschen ist notwendig. Im Vergleich zu den Robotern aus Hollywood-Filmen sind ihre Fähigkeiten begrenzt.
In den folgenden Abschnitten werden einige dieser Fähigkeiten an Hand von Videos mit NAO-Robotern exemplifiziert.
I.2.2.1 Die Sprechfähigkeit

[V.I.4]
Die maschinelle Befähigung zum Sprechen, also die künstliche Nachahmung der menschlichen Stimme durch Maschinen, wird als Sprachsynthese bezeichnet. Diese wird genutzt, um textuelle Informationen zu versprachlichen und ist u.a. in assistierenden Technologien im Einsatz, um z.B. Sehbehinderten Texte vorzulesen. Aber auch die handelsüblichen Smartphones, Computer oder Laptops besitzen Sprachausgabesoftware für den Informationsaustausch zwischen Nutzer und Gerät.
Die Technik hinter der Sprachsynthese greift auf eine Datenbank mit Audiodateien zurück und verbindet beim Versprachlichen die entsprechenden Dateien, um den Text wiederzugeben. Bei der Versprachlichung eines Textes entfernt die Software alle Ambiguitäten, die bei der Aussprache eines Wortes entstehen könnten. Danach wählt die Software Phoneme aus, um den Text in Laute zu konvertieren. Der letzte Schritt ist das Vorlesen des Textes in einer menschlichen bzw. menschenähnlichen Stimme. Der Nutzer kann oft noch die Geschwindigkeit und das Geschlecht der Stimme bestimmen. Dieser künstlichen Stimme kann man in der Regel aber keine Gefühle entnehmen, weil ihr häufig die entsprechende Intonation fehlt, sodass sie sehr monoton klingt.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Humanoide Roboter»
Представляем Вашему вниманию похожие книги на «Humanoide Roboter» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Humanoide Roboter» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.