Rafael Riddell Carvajal - Fundamentos de ingeniería estructural para estudiantes de arquitectura
Здесь есть возможность читать онлайн «Rafael Riddell Carvajal - Fundamentos de ingeniería estructural para estudiantes de arquitectura» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на испанском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Fundamentos de ingeniería estructural para estudiantes de arquitectura
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Fundamentos de ingeniería estructural para estudiantes de arquitectura: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Fundamentos de ingeniería estructural para estudiantes de arquitectura»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Fundamentos de ingeniería estructural para estudiantes de arquitectura — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Fundamentos de ingeniería estructural para estudiantes de arquitectura», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Una restricción más fuerte sobre la partícula de la Fig. 2.1 .a es obligarla a mantenerse sobre uno de los ejes coordenados, por ejemplo el eje y. En tal caso la vinculación establece que x p≡0 y z p≡0 que corresponden a 2 restricciones y por tanto la partícula queda con un grado de libertad solamente. Las condiciones de vinculación pueden ser de muy variada naturaleza; por ejemplo, la Fig. 2.1.b muestra una partícula obligada a mantenerse sobre un riel circular. Claramente la partícula tiene un sólo grado de libertad, pues basta la coordenada θ para definir la posición que tiene en el riel.
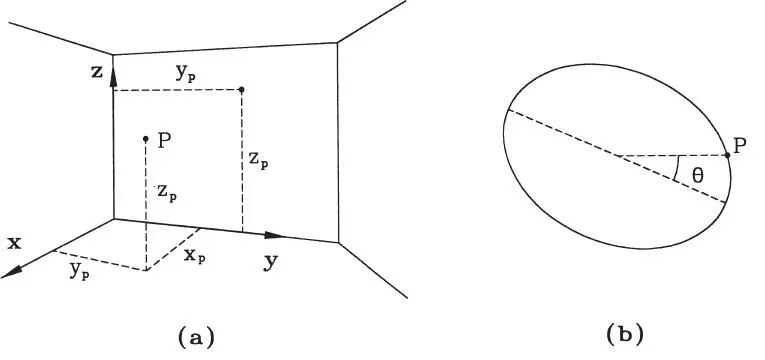
Figura 2.1Grados de libertad de una partícula
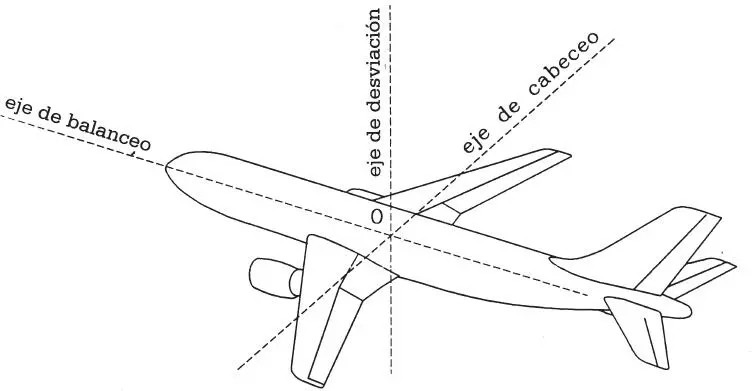
Figura 2.2Grados de libertad de un cuerpo rígido en el espacio
¿Cuántos grados de libertad tiene un cuerpo rígido en el espacio? Para responder esta pregunta el lector debe reflexionar acerca del número de coordenadas necesarias para definir su posición en el espacio, o bien, separada o conjuntamente, analizar qué posibilidades independientes tiene de moverse. De paso ha aparecido aquí un nuevo concepto, la independencia de los grados de libertad, que significa que cada grado de libertad puede variarse aisladamente sin alterar los restantes. Para imaginarse más fácilmente la situación de un cuerpo rígido en el espacio puede considerarse el caso de un avión. En el avión de la Fig. 2.2, que corresponde a uno de los modelos Airbus, se ha indicado un sistema de ejes con origen en O. Por cierto la posición geográfica del avión en vuelo puede especificarse por las coordenadas (latitud, longitud, altitud) del punto O, las que desde ya corresponden a 3 grados de libertad del aparato. Pero además, independientemente de las coordenadas del punto O, el aparato puede rotar con respecto a los tres ejes indicados, los que reciben nombres específicos conforme a las maniobras que realiza el avión. Las rotaciones con respecto a estos tres ejes corresponden a 3 grados de libertad más. En resumen, un cuerpo rígido en el espacio tiene 6 grados de libertad.
2.1.2 Dispositivos de Vinculación
En las secciones siguientes se analizarán distintas clases de estructuras, las que se fijarán al terreno, o sobre otras estructuras, mediante dispositivos estándar. Estos dispositivos, que establecen restricciones a los desplazamientos, se denominan vínculos o simplemente apoyos. Se usarán tres vínculos básicos llamados deslizante, rótula o articulación , y empotramiento , los que se describirán inicialmente en relación con su utilización en estructuras planas, aunque pueden extenderse al caso tridimensional. Siempre que se impone una restricción a un desplazamiento aparece una fuerza reactiva asociada al desplazamiento impedido (como se discutió en la Sección 1.3.2), de manera que en cada tipo de apoyo aparecerán tantas reacciones como desplazamientos se restrinjan.
Конец ознакомительного фрагмента.
Текст предоставлен ООО «ЛитРес».
Прочитайте эту книгу целиком, купив полную легальную версию на ЛитРес.
Безопасно оплатить книгу можно банковской картой Visa, MasterCard, Maestro, со счета мобильного телефона, с платежного терминала, в салоне МТС или Связной, через PayPal, WebMoney, Яндекс.Деньги, QIWI Кошелек, бонусными картами или другим удобным Вам способом.
Интервал:
Закладка:
Похожие книги на «Fundamentos de ingeniería estructural para estudiantes de arquitectura»
Представляем Вашему вниманию похожие книги на «Fundamentos de ingeniería estructural para estudiantes de arquitectura» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Fundamentos de ingeniería estructural para estudiantes de arquitectura» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.