Mark W. Spong - Robot Modeling and Control
Здесь есть возможность читать онлайн «Mark W. Spong - Robot Modeling and Control» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Robot Modeling and Control
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 2
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Robot Modeling and Control: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Robot Modeling and Control»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
, students will cover the theoretical fundamentals and the latest technological advances in robot kinematics. With so much advancement in technology, from robotics to motion planning, society can implement more powerful and dynamic algorithms than ever before. This in-depth reference guide educates readers in four distinct parts; the first two serve as a guide to the fundamentals of robotics and motion control, while the last two dive more in-depth into control theory and nonlinear system analysis.
With the new edition, readers gain access to new case studies and thoroughly researched information covering topics such as:
● Motion-planning, collision avoidance, trajectory optimization, and control of robots
● Popular topics within the robotics industry and how they apply to various technologies
● An expanded set of examples, simulations, problems, and case studies
● Open-ended suggestions for students to apply the knowledge to real-life situations
A four-part reference essential for both undergraduate and graduate students,
serves as a foundation for a solid education in robotics and motion planning.
Robot Modeling and Control — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Robot Modeling and Control», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
To see this, suppose we have two frames o 0 x 0 y 0 z 0and o 1 x 1 y 1 z 1related by the rotational transformation  . If R ∈ SO (3) represents a rotation relative to o 0 x 0 y 0 z 0, we know from Section 2.3 that the representation for R in the currentframe o 1 x 1 y 1 z 1is given by (
. If R ∈ SO (3) represents a rotation relative to o 0 x 0 y 0 z 0, we know from Section 2.3 that the representation for R in the currentframe o 1 x 1 y 1 z 1is given by (  . Therefore, applying the composition law for rotations about the current axis yields
. Therefore, applying the composition law for rotations about the current axis yields
(2.20) 
Thus, when a rotation  is performed with respect to the world coordinate frame, the current rotation matrix is premultipliedby
is performed with respect to the world coordinate frame, the current rotation matrix is premultipliedby  to obtain the desired rotation matrix.
to obtain the desired rotation matrix.
Example 2.7.(Rotations about Fixed Axes)
Referring to Figure 2.9, suppose that a rotation matrix  represents a rotation of angle ϕ about y 0followed by a rotation of angle θ about the fixed z 0. The second rotation about the fixed axis is given by
represents a rotation of angle ϕ about y 0followed by a rotation of angle θ about the fixed z 0. The second rotation about the fixed axis is given by  , which is the basic rotation about the z -axis expressed relative to the frame o 1 x 1 y 1 z 1using a similarity transformation. Therefore, the composition rule for rotational transformations gives us
, which is the basic rotation about the z -axis expressed relative to the frame o 1 x 1 y 1 z 1using a similarity transformation. Therefore, the composition rule for rotational transformations gives us
(2.21) 
It is not necessary to remember the above derivation, only to note by comparing Equation ( 2.21) with Equation ( 2.18) that we obtain the same basic rotation matrices, but in the reverse order.
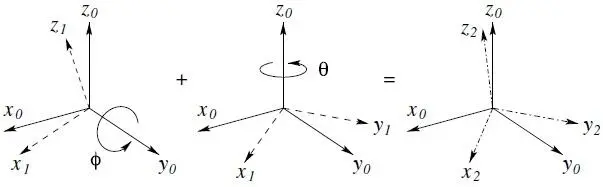
Figure 2.9 Composition of rotations about fixed axes.
2.4.3 Rules for Composition of Rotations
We can summarize the rule of composition of rotational transformations by the following recipe. Given a fixed frame o 0 x 0 y 0 z 0and a current frame o 1 x 1 y 1 z 1, together with rotation matrix  relating them, if a third frame o 2 x 2 y 2 z 2is obtained by a rotation
relating them, if a third frame o 2 x 2 y 2 z 2is obtained by a rotation  performed relative to the current framethen postmultiply
performed relative to the current framethen postmultiply  by
by  to obtain
to obtain
(2.22) 
If the second rotation is to be performed relative to the fixed framethen it is both confusing and inappropriate to use the notation  to represent this rotation. Therefore, if we represent the rotation by
to represent this rotation. Therefore, if we represent the rotation by  , we premultiply
, we premultiply  by
by  to obtain
to obtain
(2.23) 
In each case  represents the transformation between the frames o 0 x 0 y 0 z 0and o 2 x 2 y 2 z 2. The frame o 2 x 2 y 2 z 2that results from Equation ( 2.22) will be different from that resulting from Equation ( 2.23).
represents the transformation between the frames o 0 x 0 y 0 z 0and o 2 x 2 y 2 z 2. The frame o 2 x 2 y 2 z 2that results from Equation ( 2.22) will be different from that resulting from Equation ( 2.23).
Using the above rule for composition of rotations, it is an easy matter to determine the result of multiple sequential rotational transformations.
Example 2.8.
Suppose R is defined by the following sequence of basic rotations in the order specified:
1 A rotation of θ about the current x-axis
2 A rotation of ϕ about the current z-axis
3 A rotation of α about the fixed z-axis
4 A rotation of β about the current y-axis
5 A rotation of δ about the fixed x-axis
In order to determine the cumulative effect of these rotations we simply begin with the first rotation R x, θand pre- or postmultiply as the case may be to obtain
(2.24) 
2.5 Parameterizations of Rotations
The nine elements rij in a general rotational transformation  are not independent quantities. Indeed, a rigid body possesses at most three rotational degrees of freedom, and thus at most three quantities are required to specify its orientation. This can be easily seen by examining the constraints that govern the matrices in SO (3):
are not independent quantities. Indeed, a rigid body possesses at most three rotational degrees of freedom, and thus at most three quantities are required to specify its orientation. This can be easily seen by examining the constraints that govern the matrices in SO (3):
(2.25) 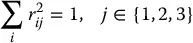
(2.26) 
Equation ( 2.25) follows from the fact that the columns of a rotation matrix are unit vectors, and Equation ( 2.26) follows from the fact that columns of a rotation matrix are mutually orthogonal. Together, these constraints define six independent equations with nine unknowns, which implies that there are three free variables.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Robot Modeling and Control»
Представляем Вашему вниманию похожие книги на «Robot Modeling and Control» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.










Обсуждение, отзывы о книге «Robot Modeling and Control» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.