Mark W. Spong - Robot Modeling and Control
Здесь есть возможность читать онлайн «Mark W. Spong - Robot Modeling and Control» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Robot Modeling and Control
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 2
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Robot Modeling and Control: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Robot Modeling and Control»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
, students will cover the theoretical fundamentals and the latest technological advances in robot kinematics. With so much advancement in technology, from robotics to motion planning, society can implement more powerful and dynamic algorithms than ever before. This in-depth reference guide educates readers in four distinct parts; the first two serve as a guide to the fundamentals of robotics and motion control, while the last two dive more in-depth into control theory and nonlinear system analysis.
With the new edition, readers gain access to new case studies and thoroughly researched information covering topics such as:
● Motion-planning, collision avoidance, trajectory optimization, and control of robots
● Popular topics within the robotics industry and how they apply to various technologies
● An expanded set of examples, simulations, problems, and case studies
● Open-ended suggestions for students to apply the knowledge to real-life situations
A four-part reference essential for both undergraduate and graduate students,
serves as a foundation for a solid education in robotics and motion planning.
Robot Modeling and Control — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Robot Modeling and Control», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Chapter 11: Vision-Based Control
Cameras have become reliable and relatively inexpensive sensors in many robotic applications. Unlike joint sensors, which give information about the internal configuration of the robot, cameras can be used not only to measure the position of the robot but also to locate objects in the robot’s workspace. In Chapter 11we discuss the use of computer vision to determine position and orientation of objects.
In some cases, we may wish to control the motion of the manipulator relative to some target as the end effector moves through free space. Here, force control cannot be used. Instead, we can use computer vision to close the control loop around the vision sensor. This is the topic of Chapter 11. There are several approaches to vision-based control, but we will focus on the method of Image-Based Visual Servo (IBVS). With IBVS, an error measured in image coordinates is directly mapped to a control input that governs the motion of the camera. This method has become very popular in recent years, and it relies on mathematical development analogous to that given in Chapter 4.
Chapter 12: Feedback Linearization
Chapter 12 discusses the method of nonlinear feedback linearization. Feedback linearization relies on more advanced tools from differential geometry. We discuss the Frobenius theorem, from which we prove necessary and sufficient conditions for a single-input nonlinear system to be equivalent under coordinate transformation and nonlinear feedback to a linear system. We apply the feedback linearization method to the control of elastic-joint robots, for which previous methods such as inverse dynamics cannot be applied.
1.4.2 Underactuated and Mobile Robots
Chapter 13: Underactuated Systems
Chapter 13 treats the control problem for underactuatedrobots, which have fewer actuators than degrees of freedom. Unlike the control of fully-actuated manipulators considered in Chapters 8–11, underactuated robots cannot track arbitrary trajectories and, consequently, the control problems are more challenging for this class of robots than for fully-actuated robots. We discuss the method of partial feedback linearization and introduce the notion of zero dynamics, which plays an important role in understanding how to control underactuated robots.
Chapter 14: Mobile Robots
Chapter 14 is devoted to the control of mobile robots, which are examples of so-called nonholonomic systems. We discuss controllability, stabilizability, and tracking control for this class of systems. Nonholonomic systems require the development of new tools for analysis and control, not treated in the previous chapters. We introduce the notions of chain-formsystems, and differential flatness, which provide methods to transform nonholonomic systems into forms amenable to control design. We discuss two important results, Chow’s theoremand Brockett’s theorem, that can be used to determine when a nonholonomic system is controllable or stabilizable, respectively.
Problems
1 What are the key features that distinguish robots from other forms of automation such as CNC milling machines?
2 Briefly define each of the following terms: forward kinematics, inverse kinematics, trajectory planning, workspace, accuracy, repeatability, resolution, joint variable, spherical wrist, end effector.
3 What are the main ways to classify robots?
4 Make a list of 10 robot applications. For each application discuss which type of manipulator would be best suited; which least suited. Justify your choices in each case.
5 List several applications for nonservo robots; for point-to-point robots; for continuous path robots.
6 List five applications that a continuous path robot could do that a point-to-point robot could not do.
7 List five applications for which computer vision would be useful in robotics.
8 List five applications for which either tactile sensing or force feedback control would be useful in robotics.
9 Suppose we could close every factory today and reopen them tomorrow fully automated with robots. What would be some of the economic and social consequences of such a development?
10 Suppose a law were passed banning all future use of industrial robots. What would be some of the economic and social consequences of such an act?
11 Discuss applications for which redundant manipulators would be useful.
12 Referring to Figure 1.24, suppose that the tip of a single link travels a distance d between two points. A linear axis would travel the distance d while a rotational link would travel through an arc length ℓθ as shown. Using the law of cosines, show that the distance d is given by which is of course less than ℓθ. With 10-bit accuracy, ℓ = 1 meter, and θ = 90°, what is the resolution of the linear link? of the rotational link?
13 For the single-link revolute arm shown in Figure 1.24, if the length of the link is 50 cm and the arm travels 180 degrees, what is the control resolution obtained with an 8-bit encoder?
14 Repeat Problem 1–13 assuming that the 8-bit encoder is located on the motor shaft that is connected to the link through a 50:1 gear reduction. Assume perfect gears.
15 Why is accuracy generally less than repeatability?
16 How could manipulator accuracy be improved using endpoint sensing? What difficulties might endpoint sensing introduce into the control problem?
17 Derive Equation ( 1.11).
18 For the two-link manipulator of Figure 1.19suppose a1 = a2 = 1.Find the coordinates of the tool when and .If the joint velocities are constant at , , what is the velocity of the tool? What is the instantaneous tool velocity when ?Write a computer program to plot the joint angles as a function of time given the tool locations and velocities as a function of time in Cartesian coordinates.Suppose we desire that the tool follow a straight line between the points (0,2) and (2,0) at constant speed s. Plot the time history of joint angles.
19 For the two-link planar manipulator of Figure 1.19is it possible for there to be an infinite number of solutions to the inverse kinematic equations? If so, explain how this can occur.
20 Explain why it might be desirable to reduce the mass of distal links in a manipulator design. List some ways this can be done. Discuss any possible disadvantages of such designs.
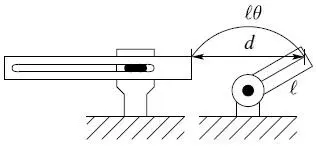
Figure 1.24 Diagram for Problem 1–12, 1–13, and 1–14.
Notes and References
We give below some of the important milestones in the history of modern robotics.
1947 — The first servoed electric powered teleoperator is developed.
1948 — A teleoperator is developed incorporating force feedback.
1949 — Research on numerically controlled milling machine is initiated.
1954 — George Devol designs the first programmable robot
1956 — Joseph Engelberger, a Columbia University physics student, buys the rights to Devol’s robot and founds the Unimation Company.
1961 — The first Unimate robot is installed in a Trenton, New Jersey plant of General Motors to tend a die casting machine.
1961 — The first robot incorporating force feedback is developed.
1963 — The first robot vision system is developed.
1971 — The Stanford Arm is developed at Stanford University.
1973 — The first robot programming language (WAVE) is developed at Stanford.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Robot Modeling and Control»
Представляем Вашему вниманию похожие книги на «Robot Modeling and Control» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.










Обсуждение, отзывы о книге «Robot Modeling and Control» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.