Mark W. Spong - Robot Modeling and Control
Здесь есть возможность читать онлайн «Mark W. Spong - Robot Modeling and Control» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Robot Modeling and Control
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 2
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Robot Modeling and Control: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Robot Modeling and Control»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
, students will cover the theoretical fundamentals and the latest technological advances in robot kinematics. With so much advancement in technology, from robotics to motion planning, society can implement more powerful and dynamic algorithms than ever before. This in-depth reference guide educates readers in four distinct parts; the first two serve as a guide to the fundamentals of robotics and motion control, while the last two dive more in-depth into control theory and nonlinear system analysis.
With the new edition, readers gain access to new case studies and thoroughly researched information covering topics such as:
● Motion-planning, collision avoidance, trajectory optimization, and control of robots
● Popular topics within the robotics industry and how they apply to various technologies
● An expanded set of examples, simulations, problems, and case studies
● Open-ended suggestions for students to apply the knowledge to real-life situations
A four-part reference essential for both undergraduate and graduate students,
serves as a foundation for a solid education in robotics and motion planning.
Robot Modeling and Control — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Robot Modeling and Control», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
The arm and wrist assemblies of a robot are used primarily for positioning the hand, end effector, and any toolit may carry. It is the end effector or tool that actually performs the task. The simplest type of end effector is a gripper, such as shown in Figure 1.9, which is usually capable of only two actions, openingand closing. While this is adequate for materials transfer, some parts handling, or gripping simple tools, it is not adequate for other tasks such as welding, assembly, grinding, etc.

Figure 1.9 A two-finger gripper. (Photo courtesy of Robotiq, Inc.)
A great deal of research is therefore devoted to the design of special purpose end effectors as well as of tools that can be rapidly changed as the task dictates. Since we are concerned with the analysis and control of the manipulator itself and not in the particular application or end effector, we will not discuss the design of end effectors or the study of grasping and manipulation. There is also much research on the development of anthropomorphic hands such as that shown in Figure 1.10.
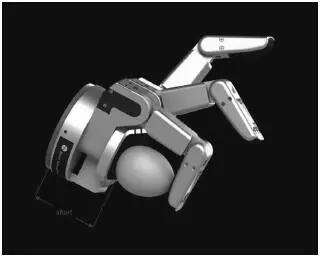
Figure 1.10 Anthropomorphic hand developed by Barrett Technologies. Such grippers allow for more dexterity and the ability to manipulate objects of various sizes and geometries. (Photo courtesy of Barrett Technologies.)
1.3 Common Kinematic Arrangements
There are many possible ways to construct kinematic chains using prismatic and revolute joints. However, in practice, only a few kinematic designs are commonly used. Here we briefly describe the most typical arrangements.
1.3.1 Articulated Manipulator (RRR)
The articulated manipulator is also called a revolute, elbow, or anthropomorphicmanipulator. The KUKA 500 articulated arm is shown in Figure 1.11. In the anthropomorphic design the three links are designated as the body, upper arm, and forearm, respectively, as shown in Figure 1.11. The joint axes are designated as the waist( z 0), shoulder( z 1), and elbow( z 2). Typically, the joint axis z 2is parallel to z 1and both z 1and z 2are perpendicular to z 0. The workspace of the elbow manipulator is shown in Figure 1.12.
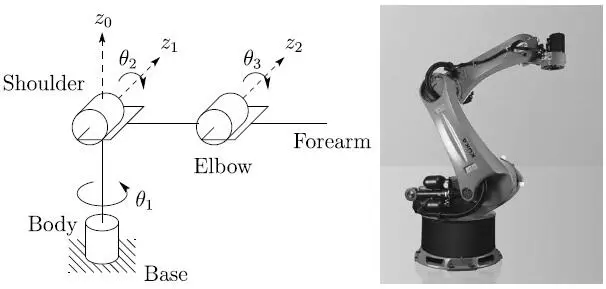
Figure 1.11 Symbolic representation of an RRR manipulator (left), and the KUKA 500 arm (right), which is a typical example of an RRR manipulator. The links and joints of the RRR configuration are analogous to human joints and limbs. (Photo courtesy of KUKA Robotics.)
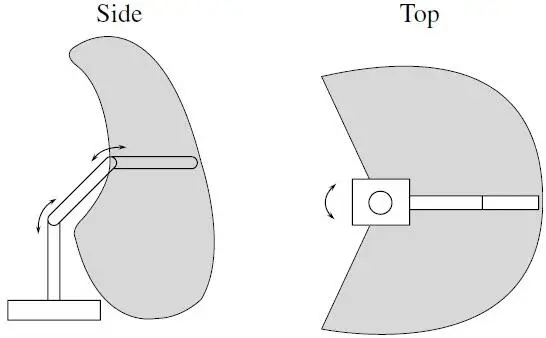
Figure 1.12 Workspace of the elbow manipulator. The elbow manipulator provides a larger workspace than other kinematic designs relative to its size.
1.3.2 Spherical Manipulator (RRP)
By replacing the third joint, or elbow joint, in the revolute manipulator by a prismatic joint, one obtains the spherical manipulator shown in Figure 1.13. The term spherical manipulatorderives from the fact that the joint coordinates coincide with the spherical coordinates of the end effector relative to a coordinate frame located at the shoulder joint. Figure 1.13shows the Stanford Arm, one of the most well-known spherical robots.
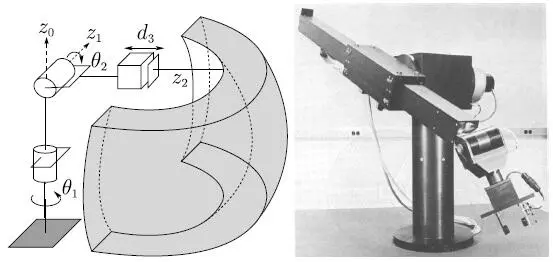
Figure 1.13 Schematic representation of an RRP manipulator, referred to as a spherical robot (left), and the Stanford Arm (right), an early example of a spherical arm. (Photo courtesy of the Coordinated Science Laboratory, University of Illinois at Urbana-Champaign.)
1.3.3 SCARA Manipulator (RRP)
The SCARAarm (for Selective Compliant Articulated Robot for Assembly) shown in Figure 1.14is a popular manipulator, which, as its name suggests, is tailored for pick-and-place and assembly operations. Although the SCARA has an RRP structure, it is quite different from the spherical manipulator in both appearance and in its range of applications. Unlike the spherical design, which has z 0perpendicular to z 1, and z 1perpendicular to z 2, the SCARA has z 0, z 1, and z 2mutually parallel. Figure 1.14shows the symbolic representation of a SCARA arm and the Yamaha YK-XC manipulator.
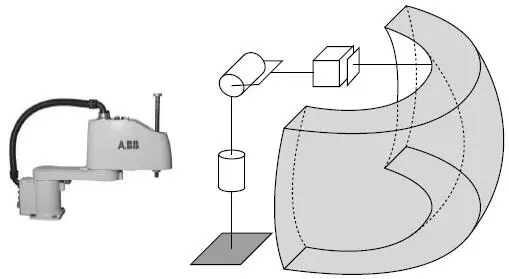
Figure 1.14 The ABB IRB910SC SCARA robot (left) and the symbolic representation showing a portion of its workspace (right). (Photo courtesy of ABB.)
1.3.4 Cylindrical Manipulator (RPP)
The cylindrical manipulator is shown in Figure 1.15. The first joint is revolute and produces a rotation about the base, while the second and third joints are prismatic. As the name suggests, the joint variables are the cylindrical coordinates of the end effector with respect to the base.
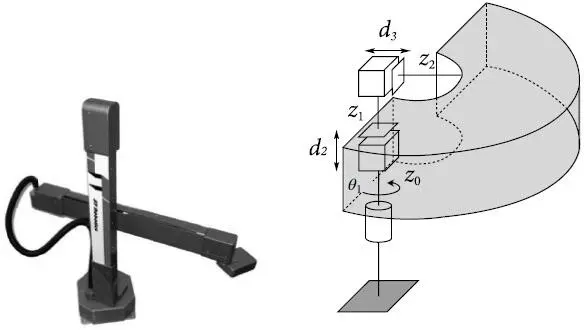
Figure 1.15 The ST Robotics R19 cylindrical robot (left) and the symbolic representation showing a portion of its workspace (right). Cylindrical robots are often used in materials transfer tasks. (Photo courtesy of ST Robotics.)
1.3.5 Cartesian Manipulator (PPP)
A manipulator whose first three joints are prismatic is known as a Cartesian manipulator. The joint variables of the Cartesian manipulator are the Cartesian coordinates of the end effector with respect to the base. As might be expected, the kinematic description of this manipulator is the simplest of all manipulators. Cartesian manipulators are useful for table-top assembly applications and, as gantry robots, for transfer of material or cargo. The symbolic representation of a Cartesian robot is shown in Figure 1.16.
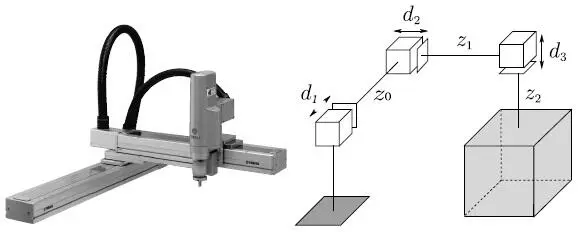
Figure 1.16 The Yamaha YK-XC Cartesian robot (left) and the symbolic representation showing a portion of its workspace (right). Cartesian robots are often used in pick-and-place operations. (Photo courtesy of Yamaha Robotics.)
1.3.6 Parallel Manipulator
A parallel manipulatoris one in which some subset of the links form a closed chain. More specifically, a parallel manipulator has two or more kinematic chains connecting the base to the end effector. Figure 1.17shows the ABB IRB360 robot, which is a parallel manipulator. The closed-chain kinematics of parallel robots can result in greater structural rigidity, and hence greater accuracy, than open chain robots. The kinematic description of parallel robots is fundamentally different from that of serial link robots and therefore requires different methods of analysis.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Robot Modeling and Control»
Представляем Вашему вниманию похожие книги на «Robot Modeling and Control» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.










Обсуждение, отзывы о книге «Robot Modeling and Control» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.