Mark W. Spong - Robot Modeling and Control
Здесь есть возможность читать онлайн «Mark W. Spong - Robot Modeling and Control» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Robot Modeling and Control
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 2
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Robot Modeling and Control: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Robot Modeling and Control»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
, students will cover the theoretical fundamentals and the latest technological advances in robot kinematics. With so much advancement in technology, from robotics to motion planning, society can implement more powerful and dynamic algorithms than ever before. This in-depth reference guide educates readers in four distinct parts; the first two serve as a guide to the fundamentals of robotics and motion control, while the last two dive more in-depth into control theory and nonlinear system analysis.
With the new edition, readers gain access to new case studies and thoroughly researched information covering topics such as:
● Motion-planning, collision avoidance, trajectory optimization, and control of robots
● Popular topics within the robotics industry and how they apply to various technologies
● An expanded set of examples, simulations, problems, and case studies
● Open-ended suggestions for students to apply the knowledge to real-life situations
A four-part reference essential for both undergraduate and graduate students,
serves as a foundation for a solid education in robotics and motion planning.
Robot Modeling and Control — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Robot Modeling and Control», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:

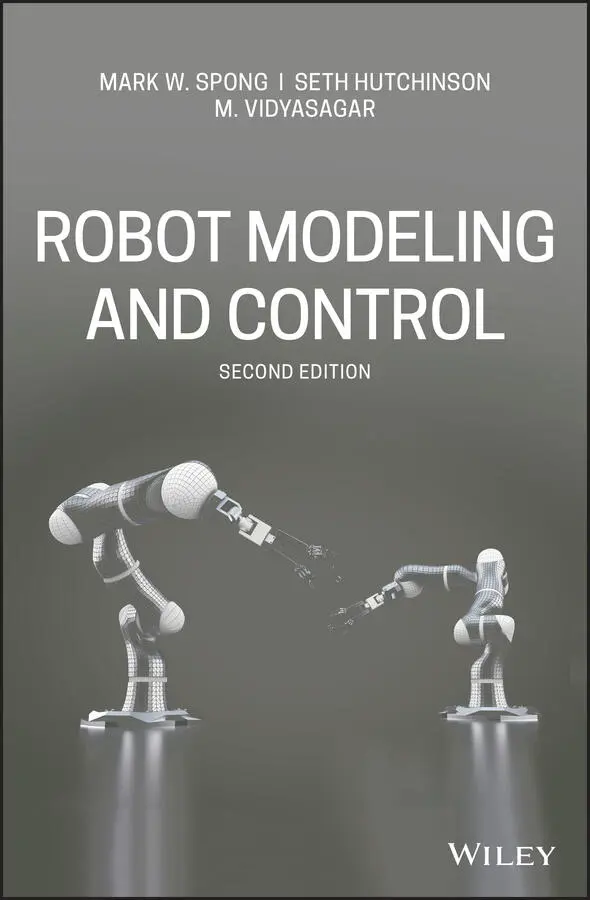
Figure 1.5The Kinova ®Gen3 Ultra lightweight arm, a 7-degree-of-freedom redundant manipulator. (Photo courtesy of Kinova, Inc.)
Each joint represents the interconnection between two links. We denote the axis of rotation of a revolute joint, or the axis along which a prismatic joint translates by zi if the joint is the interconnection of links i and i + 1. The joint variables, denoted by θ for a revolute joint and d for the prismatic joint, represent the relative displacement between adjacent links. We will make this precise in Chapter 3.
1.1.2 The Configuration Space
A configurationof a manipulator is a complete specification of the location of every point on the manipulator. The set of all configurations is called the configuration space. In the case of a manipulator arm, if we know the values for the joint variables (i.e., the joint angle for revolute joints, or the joint offset for prismatic joints), then it is straightforward to infer the position of any point on the manipulator, since the individual links of the manipulator are assumed to be rigid and the base of the manipulator is assumed to be fixed. Therefore, we will represent a configuration by a set of values for the joint variables. We will denote this vector of values by q , and say that the robot is in configuration q when the joint variables take on the values q 1, …, qn , with qi = θ ifor a revolute joint and qi = di for a prismatic joint.
An object is said to have n degrees of freedom(DOF) if its configuration can be minimally specified by n parameters. Thus, the number of DOF is equal to the dimension of the configuration space. For a robot manipulator, the number of joints determines the number of DOF. A rigid object in three-dimensional space has six DOF: three for positioningand three for orientation. Therefore, a manipulator should typically possess at least six independent DOF. With fewer than six DOF the arm cannot reach every point in its work space with arbitrary orientation. Certain applications such as reaching around or behind obstacles may require more than six DOF. A manipulator having more than six DOF is referred to as a kinematically redundantmanipulator.
1.1.3 The State Space
A configuration provides an instantaneous description of the geometry of a manipulator, but says nothing about its dynamic response. In contrast, the stateof the manipulator is a set of variables that, together with a description of the manipulator’s dynamics and future inputs, is sufficient to determine the future time response of the manipulator. The state spaceis the set of all possible states. In the case of a manipulator arm, the dynamics are Newtonian, and can be specified by generalizing the familiar equation F = ma . Thus, a state of the manipulator can be specified by giving the values for the joint variables q and for the joint velocities  (acceleration is related to the derivative of joint velocities). The dimension of the state space is thus 2 n if the system has n DOF.
(acceleration is related to the derivative of joint velocities). The dimension of the state space is thus 2 n if the system has n DOF.
1.1.4 The Workspace
The workspaceof a manipulator is the total volume swept out by the end effector as the manipulator executes all possible motions. The workspace is constrained by the geometry of the manipulator as well as mechanical constraints on the joints. For example, a revolute joint may be limited to less than a full 360° of motion. The workspace is often broken down into a reachable workspaceand a dexterous workspace. The reachable workspace is the entire set of points reachable by the manipulator, whereas the dexterous workspace consists of those points that the manipulator can reach with an arbitrary orientation of the end effector. Obviously the dexterous workspace is a subset of the reachable workspace. The workspaces of several robots are shown later in this chapter.
1.2 Robots as Mechanical Devices
There are a number of physical aspects of robotic manipulators that we will not necessarily consider when developing our mathematical models. These include mechanical aspects (e.g., how are the joints actually constructed), accuracy and repeatability, and the tooling attached at the end effector. In this section, we briefly describe some of these.
1.2.1 Classification of Robotic Manipulators
Robot manipulators can be classified by several criteria, such as their power source, meaning the way in which the joints are actuated; their geometry, or kinematic structure; their method of control; and their intended application area. Such classification is useful primarily in order to determine which robot is right for a given task. For example, an hydraulic robot would not be suitable for food handling or clean room applications whereas a SCARA robot would not be suitable for automobile spray painting. We explain this in more detail below.
Power Source
Most robots are either electrically, hydraulically, or pneumatically powered. Hydraulic actuators are unrivaled in their speed of response and torque producing capability. Therefore hydraulic robots are used primarily for lifting heavy loads. The drawbacks of hydraulic robots are that they tend to leak hydraulic fluid, require much more peripheral equipment (such as pumps, which require more maintenance), and they are noisy. Robots driven by DC or AC motors are increasingly popular since they are cheaper, cleaner and quieter. Pneumatic robots are inexpensive and simple but cannot be controlled precisely. As a result, pneumatic robots are limited in their range of applications and popularity.
Method of Control
Robots are classified by control method into servoand nonservorobots. The earliest robots were nonservo robots. These robots are essentially open-loopdevices whose movements are limited to predetermined mechanical stops, and they are useful primarily for materials transfer. In fact, according to the definition given above, fixed stop robots hardly qualify as robots. Servo robots use closed-loopcomputer control to determine their motion and are thus capable of being truly multifunctional, reprogrammable devices.
Servo controlled robots are further classified according to the method that the controller uses to guide the end effector. The simplest type of robot in this class is the point-to-pointrobot. A point-to-point robot can be taught a discrete set of points but there is no control of the path of the end effector in between taught points. Such robots are usually taught a series of points with a teach pendant. The points are then stored and played back. Point-to-point robots are limited in their range of applications. With continuous pathrobots, on the other hand, the entire path of the end effector can be controlled. For example, the robot end effector can be taught to follow a straight line between two points or even to follow a contour such as a welding seam. In addition, the velocity and/or acceleration of the end effector can often be controlled. These are the most advanced robots and require the most sophisticated computer controllers and software development.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Robot Modeling and Control»
Представляем Вашему вниманию похожие книги на «Robot Modeling and Control» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.










Обсуждение, отзывы о книге «Robot Modeling and Control» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.