Mark W. Spong - Robot Modeling and Control
Здесь есть возможность читать онлайн «Mark W. Spong - Robot Modeling and Control» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Robot Modeling and Control
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 2
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Robot Modeling and Control: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Robot Modeling and Control»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
, students will cover the theoretical fundamentals and the latest technological advances in robot kinematics. With so much advancement in technology, from robotics to motion planning, society can implement more powerful and dynamic algorithms than ever before. This in-depth reference guide educates readers in four distinct parts; the first two serve as a guide to the fundamentals of robotics and motion control, while the last two dive more in-depth into control theory and nonlinear system analysis.
With the new edition, readers gain access to new case studies and thoroughly researched information covering topics such as:
● Motion-planning, collision avoidance, trajectory optimization, and control of robots
● Popular topics within the robotics industry and how they apply to various technologies
● An expanded set of examples, simulations, problems, and case studies
● Open-ended suggestions for students to apply the knowledge to real-life situations
A four-part reference essential for both undergraduate and graduate students,
serves as a foundation for a solid education in robotics and motion planning.
Robot Modeling and Control — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Robot Modeling and Control», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
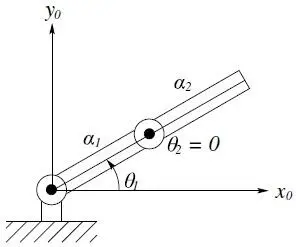
Figure 1.20 A singular configuration results when the elbow is straight. In this configuration the two-link robot has only one DOF.
Chapter 5: Inverse Kinematics
Now, given the joint angles θ 1, θ 2we can determine the end-effector coordinates x and y from Equations ( 1.1) and ( 1.2). In order to command the robot to move to location A we need the inverse; that is, we need to solve for the joint variables θ 1, θ 2in terms of the x and y coordinates of A . This is the problem of inverse kinematics. Since the forward kinematic equations are nonlinear, a solution may not be easy to find, nor is there a unique solution in general. We can see in the case of a two-link planar mechanism that there may be no solution, for example if the given ( x , y ) coordinates are out of reach of the manipulator. If the given ( x , y ) coordinates are within the manipulator’s reach there may be two solutions as shown in Figure 1.21,
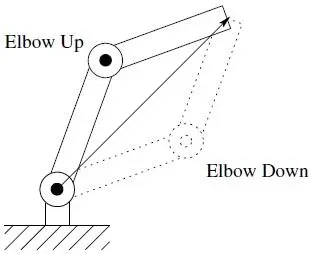
Figure 1.21 The two-link elbow robot has two solutions to the inverse kinematics except at singular configurations, the elbow up solution and the elbow down solution.
the so-called elbow upand elbow downconfigurations, or there may be exactly one solution if the manipulator must be fully extended to reach the point. There may even be an infinite number of solutions in some cases (Problem 1–19).
Consider the diagram of Figure 1.22. Using the law of cosines 1we see that the angle θ 2is given by
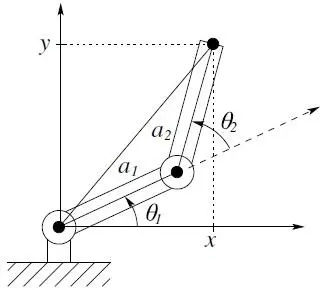
Figure 1.22 Solving for the joint angles of a two-link planar arm.
(1.8) 
We could now determine θ 2as θ 2= cos − 1( D ). However, a better way to find θ 2is to notice that if cos ( θ 2) is given by Equation ( 1.8), then sin ( θ 2) is given as
(1.9) 
and, hence, θ 2can be found by
(1.10) 
The advantage of this latter approach is that both the elbow-up and elbow-down solutions are recovered by choosing the negative and positive signs in Equation ( 1.10), respectively.
It is left as an exercise (Problem 1–17) to show that θ 1is now given as
(1.11) 
Notice that the angle θ 1depends on θ 2. This makes sense physically since we would expect to require a different value for θ 1, depending on which solution is chosen for θ 2.
Chapter 6: Dynamics
In Chapter 6we develop techniques based on Lagrangian dynamicsfor systematically deriving the equations of motion for serial-link manipulators. Deriving the dynamic equations of motion for robots is not a simple task due to the large number of degrees of freedom and the nonlinearities present in the system. We also discuss the so-called recursive Newton–Eulermethod for deriving the robot equations of motion. The Newton–Euler formulation is well-suited for real-time computation for both simulation and control applications.
Chapter 7: Path Planning and Trajectory Generation
The robot control problem is typically decomposed hierarchically into three tasks: path planning, trajectory generation, and trajectory tracking. The path planning problem, considered in Chapter 7, is to determine a path in task space (or configuration space) to move the robot to a goal position while avoiding collisions with objects in its workspace. These paths encode position and orientation information without timing considerations, that is, without considering velocities and accelerations along the planned paths. The trajectory generation problem, also considered in Chapter 7, is to generate reference trajectories that determine the time history of the manipulator along a given path or between initial and final configurations. These are typically given in joint space as polynomial functions of time. We discuss the most common polynomial interpolation schemes used to generate these trajectories.
Chapter 8: Independent Joint Control
Once reference trajectories for the robot are specified, it is the task of the control system to track them. In Chapter 8we discuss the motion control problem. We treat the twin problems of tracking and disturbance rejection, which are to determine the control inputs necessary to follow, or track, a reference trajectory, while simultaneously rejectingdisturbances due to unmodeled dynamic effects such as friction and noise. We first model the actuator and drive-train dynamics and discuss the design of independent joint control algorithms.
A block diagram of a single-input/single-output (SISO) feedback control system is shown in Figure 1.23. We detail the standard approaches to robot control based on both frequency domain and state space techniques. We also introduce the notion of feedforward controlfor tracking time-varying trajectories. We also introduce the fundamental notion of computed torque, which is a feedforward disturbance cancellation scheme.
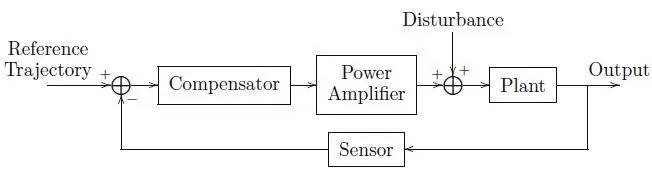
Figure 1.23 Basic structure of a feedback control system. The compensator measures the error between a reference and a measured output and produces a signal to the plant that is designed to drive the error to zero despite the presences of disturbances.
Chapter 9: Nonlinear and Multivariable Control
In Chapter 9we discuss more advanced control techniques based on the Lagrangian dynamic equations of motion derived in Chapter 6. We introduce the notion of inverse dynamicscontrol as a means for compensating the complex nonlinear interaction forces among the links of the manipulator. Robust and adaptive control of manipulators are also introduced using the direct method of Lyapunovand so-called passivity-based control.
Chapter 10: Force Control
In the example robot task above, once the manipulator has reached location A , it must follow the contour S maintaining a constant force normal to the surface. Conceivably, knowing the location of the object and the shape of the contour, one could carry out this task using position control alone. This would be quite difficult to accomplish in practice, however. Since the manipulator itself possesses high rigidity, any errors in position due to uncertainty in the exact location of the surface or tool would give rise to extremely large forces at the end effector that could damage the tool, the surface, or the robot. A better approach is to measure the forces of interaction directly and use a force controlscheme to accomplish the task. In Chapter 10we discuss force control and compliance, along with common approaches to force control, namely hybrid controland impedance control.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Robot Modeling and Control»
Представляем Вашему вниманию похожие книги на «Robot Modeling and Control» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.










Обсуждение, отзывы о книге «Robot Modeling and Control» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.