Efstratios N. Pistikopoulos - Multi-parametric Optimization and Control
Здесь есть возможность читать онлайн «Efstratios N. Pistikopoulos - Multi-parametric Optimization and Control» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Multi-parametric Optimization and Control
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Multi-parametric Optimization and Control: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Multi-parametric Optimization and Control»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
ecent developments in multi-parametric optimization and control
Multi-Parametric Optimization and Control Researchers and practitioners can use the book as reference. It is also suitable as a primary or a supplementary textbook. Each chapter looks at the theories related to a topic along with a relevant case study. Topic complexity increases gradually as readers progress through the chapters. The first part of the book presents an overview of the state-of-the-art multi-parametric optimization theory and algorithms in multi-parametric programming. The second examines the connection between multi-parametric programming and model-predictive control—from the linear quadratic regulator over hybrid systems to periodic systems and robust control.
The third part of the book addresses multi-parametric optimization in process systems engineering. A step-by-step procedure is introduced for embedding the programming within the system engineering, which leads the reader into the topic of the PAROC framework and software platform. PAROC is an integrated framework and platform for the optimization and advanced model-based control of process systems.
Uses case studies to illustrate real-world applications for a better understanding of the concepts presented Covers the fundamentals of optimization and model predictive control Provides information on key topics, such as the basic sensitivity theorem, linear programming, quadratic programming, mixed-integer linear programming, optimal control of continuous systems, and multi-parametric optimal control An appendix summarizes the history of multi-parametric optimization algorithms. It also covers the use of the parametric optimization toolbox (POP), which is comprehensive software for efficiently solving multi-parametric programming problems.
Multi-parametric Optimization and Control — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Multi-parametric Optimization and Control», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
(2.16) 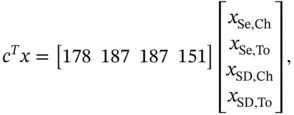
where the coefficients are calculated according to Eq. (2.15). The next step is to formulate the constraints. The constraints are that (i) there cannot be more supply than amount in stock and (ii) the market demands needs to be satisfied. Mathematically, this can be written as
(2.17a) 
(2.17b) 
Additionally, note that transport can only be positive. This results in the LP problem of the form:
(2.18) 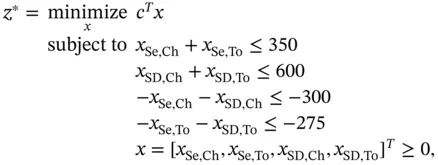
the solution of which features the minimal cost of  , and the corresponding transport amounts as
, and the corresponding transport amounts as
(2.19) 
2.4.2 Considering Demand Uncertainty
In reality, the data in Table 2.1is time‐varying. Thus, the case of demand uncertainty is considered:
Given a set of plants  with a constant supply and a set of markets
with a constant supply and a set of markets  with an uncertain demand bound between 0 and 1000 cases, and the distances between
with an uncertain demand bound between 0 and 1000 cases, and the distances between  and
and  , minimize the total transportation cost as a function of the demand.
, minimize the total transportation cost as a function of the demand.
Based on the LP problem ( 2.18), the following mp‐LP problem is formulated:
(2.20) 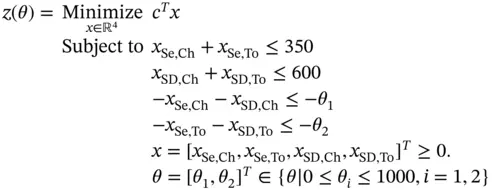
Note that the objective function does not change as the distances between the destinations do not change. However on the contrary to problem ( 2.18), problem ( 2.20) now features the uncertain demands as parameters 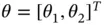 bound between 0 and 1000. The solution of problem ( 2.20) is reported in Table 2.3, which was obtained based on the solution strategies presented in Chapter 4.
bound between 0 and 1000. The solution of problem ( 2.20) is reported in Table 2.3, which was obtained based on the solution strategies presented in Chapter 4.
Remark 2.5
The numbering of the constraints is according to their occurrence in problem ( 2.20), e.g.  is constraint number 5.
is constraint number 5.
Table 2.3The solution of problem ( 2.20).
 |
2.4.3 Interpretation of the Results
In Table 2.3, it is shown that the solution to problem ( 2.20) is given by three critical regions. This means that for different demand values, there is a change in which of the constraints in problem ( 2.20) is active.
The first critical region: For the first critical region, the third and fourth constraints, together with the non‐negativity of , are active. These are the constraints that define the market demand, given from the deterministic values in Eq. (2.17b). Thus, the solution within the first critical region is only concerned with fulfilling the market demand, as the supply limits are not relevant (see second and third critical regions). Consequently, the optimal solution goes along the cheapest transportation routes, which are Seattle to Chicago (cost in objective function: 178) and San Diego to Topeka (cost in objective function: 151). The amount that is transported is thereby given by the market demand, i.e. and .
The second critical region: The second critical region is obtained, when the market demand of Chicago, , exceeds the supply of Seattle, which is 350. This is apparent in the new active set, which includes the supply constraint of Seattle (the first constraint). Then, in order to fulfill the demand, there needs to be a supply from San Diego, and thus , , while the demand from Topeka can still be fulfilled from San Diego with .
The third critical region: Similarly to the second critical region, the third critical region results when San Diego is unable to meet all the demands from Topeka, as the supply limit of 600 is reached. Then, the supply constraint from San Diego becomes active (the second constraint), and in order to fulfill the demand, material will be transported from Seattle to Topeka, and thus , , while the demand from Chicago is met from Seattle with .
Infeasible region: As soon as the sum of the demand, , is greater than the available supply, , there is no possibility to meet all the demands with the supply given. Thus, there is no feasible solution for .
2.5 Literature Review
The idea to consider the variation of a parameter in an LP problem was reportedly first put forth in the unpublished master thesis by William Orchard‐Hays in 1952, as reported in [14], where the variation of the right‐hand side of the constraints was considered:
(2.21) 
Subsequently, several researchers proposed algorithms for the treatment of the single parameter case [15–20], but it was not until 1972 when the seminal paper by Gal and Nedoma described for the first time a rigorous strategy for the general solution of mp‐LP problems of type ( 2.2) based on the connected‐graph theorem [2]. All these developments were captured in the excellent textbook by Gal and Davis from 1979 [21], for which a second edition appeared in 1995 [22].
The algorithm from [2] remained the state‐of‐the‐art for over 25 years (see, e.g. [23,24]), until geometrical algorithms for general mp‐LP problems were developed starting in 2000, 5with the application of multi‐parametric programming to model‐predictive control [26,27]. Although the initial focus was put on mp‐QP problems, quickly publications concerning combination of model predictive control and mp‐LP problems were put forth [28–31], many of which were captured in this excellent review [32]. This new string of developments resulted in a deeper interest in the theoretical properties of mp‐LP problems, specifically in the case of degeneracy (see section 2.2), as well as the question of the presence of parameters in the left‐hand side of the constraints, i.e.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Multi-parametric Optimization and Control»
Представляем Вашему вниманию похожие книги на «Multi-parametric Optimization and Control» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.









Обсуждение, отзывы о книге «Multi-parametric Optimization and Control» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.