Rafael Riddell Carvajal - Fundamentos de ingeniería estructural para estudiantes de arquitectura
Здесь есть возможность читать онлайн «Rafael Riddell Carvajal - Fundamentos de ingeniería estructural para estudiantes de arquitectura» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на испанском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Fundamentos de ingeniería estructural para estudiantes de arquitectura
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Fundamentos de ingeniería estructural para estudiantes de arquitectura: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Fundamentos de ingeniería estructural para estudiantes de arquitectura»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Fundamentos de ingeniería estructural para estudiantes de arquitectura — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Fundamentos de ingeniería estructural para estudiantes de arquitectura», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Las bondades de un modelo dependen de las preguntas que se desea responder. Por ejemplo, la Tierra y los planetas pueden modelarse como partículas para efectos de estudiar sus órbitas alrededor del sol, pero ciertamente el modelo de partícula de la Tierra no servirá para estudiar la trayectoria de un vehículo espacial que regresa a ella.
En estática, hay un hecho fundamental inherente al modelo de partícula: las fuerzas aplicadas a ella son concurrentes. Por ello, aunque será común modelar cuerpos de dimensiones finitas como partículas, la condición fundamental para ello es la concurrencia de las fuerzas. En caso contrario las dimensiones reales del cuerpo no pueden ignorarse, y las condiciones de equilibrio de la partícula son insuficientes.
De acuerdo a la 2 aLey de Newton (Ec. 1-4) una partícula experimentará una aceleración a no ser que la fuerza que actúa sobre ella sea nula. Entonces, si F es la fuerza que actúa sobre una partícula, es condición necesaria y suficiente para su equilibrio que:

Si sobre una partícula actúan n fuerzas F i, es condición necesaria y suficiente para el equilibrio que la resultante R del sistema de fuerzas sea nula:

Simbólicamente, la condición anterior puede escribirse como:


Figura 1.30Coliseo Romano
pero teniendo presente que las cantidades involucradas en la sumatoria corresponden a cantidades vectoriales que no pueden sumarse simplemente en forma algebraica sino conforme a las reglas descritas en la Sección 1.4.
La ecuación vectorial anterior puede expresarse escalarmente en términos de las componentes de las fuerzas. En referencia a un sistema cartesiano de ejes x, y, z en el espacio tridimensional, la Ec. 1-29 se transforma en las tres ecuaciones escalares:



En la Ec. l-30.a R xes la componente x de la resultante, y F 1x, F 2x, hasta F nxson las componentes según x de las fuerzas F 1, F 2, hasta F nrespectivamente. Similar significado tienen las Ecs. 1-30.b y c pero en referencia a las proyecciones de las fuerzas en los ejes “y” y “z” respectivamente. En forma todavía más simplificada, es común que las condiciones de equilibrio (Ecs. 1-30) se escriban usando la notación:



Al presentar la condición de equilibrio de una partícula (Ec. 1-27), se mencionó su categoría de condición necesaria y suficiente. La distinción entre necesidad y suficiencia es un aspecto de lógica que es relevante abordar aquí, ya que volverá a presentarse al establecer las condiciones de equilibrio de los sistemas de partículas y de los cuerpos rígidos en la Sección 1.7. Se dice que la condición B es necesaria , si dado A implica B (A⇒B). En este caso, si la partícula está en equilibrio es necesario que F=0; es decir la condición F=0 es necesaria para el equilibrio de la partícula. Inversamente, se dice que la condición B es suficiente si dado B implica A (A⇐B). En este caso, si F=0 se concluye que la partícula está en equilibrio, es decir la condición F=0 es suficiente para el equilibrio de la partícula. Una condición necesaria y suficiente (A⇔B) es de mayor categoría que una que es solamente necesaria (A⇒B). Un ejemplo sencillo de este último caso se desprende de la proposición siguiente: Si sale agua del grifo (A), la llave está abierta (B); es decir, que la llave esté abierta es condición necesaria, pero no suficiente, ya que ello no es garantía de que salga agua, y la proposición inversa es falsa.
Adicionalmente a las ecuaciones de equilibrio de la partícula, explicitadas en la forma de las Ecs. 1-28, 1-29, 1-30 ó 1-31, existen formas alternativas de expresarlas, como también ciertas propiedades que son con frecuencia útiles. Estas se resumen en los teoremas siguientes:
a) Teorema del Polígono de Fuerzas: Si una partícula está en equilibrio bajo la acción de varias fuerzas , el polígono de ellas es cerrado . La conclusión es obvia, ya que la condición geométrica de polígono cerrado es equivalente a que la resultante sea nula.
b) Teorema de la Coplanariedad: Si una partícula está en equilibrio bajo la acción de 3 fuerzas , las fuerzas son coplanares . Ello se demuestra reconociendo que dos de las fuerzas definen un plano, por tanto la tercera fuerza no podría estar fuera del plano pues sería imposible equilibrar su componente perpendicular al plano de las otras dos.
c) Teorema del Triángulo: Si una partícula está en equilibrio bajo la acción de 3 fuerzas , éstas pueden representarse en magnitud y dirección por los lados de un triángulo . Esta es conclusión directa de los teoremas anteriores, ya que el polígono cerrado es un triángulo plano.
d) Teorema de Lamy: Si una partícula está en equilibrio bajo la acción de 3 fuerzas , la magnitud de cada una de ellas es proporcional al seno del ángulo formado por las otras dos (Fig. 1.31.a y Ec. 1-33). De la trigonometría se tiene el conocido Teorema del Seno en un triángulo plano (Fig. 1.31.b):

pero sen (180 – α) = sen α, luego

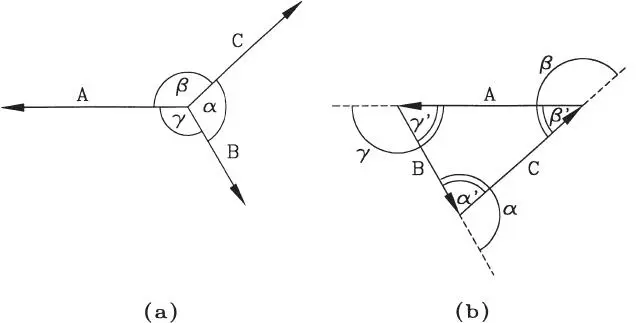
Figura 1.31Teorema de Lamy
e) Teorema del Cuerpo Sometido a 3 Fuerzas: Si un cuerpo está en equilibrio bajo la acción de tres fuerzas , las fuerzas son coplanares y sus líneas de acción son o bien concurrentes o paralelas. Aunque este teorema sólo puede probarse haciendo uso de las condiciones de equilibrio de un cuerpo rígido, que se verán más adelante, se ha enunciado en forma anticipada porque constituye una poderosa herramienta para la solución de problemas de estática. En efecto, cuerpos de dimensiones finitas, que no son realmente partículas, pueden siempre tratarse como tales si están sometidos a tres fuerzas y éstas no son paralelas. El equilibrio exige la coplanariedad y la concurrencia de las fuerzas, por lo que estos problemas se reducen a considerar el equilibrio de una partícula hipotética ubicada en el punto de concurrencia de las fuerzas.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Fundamentos de ingeniería estructural para estudiantes de arquitectura»
Представляем Вашему вниманию похожие книги на «Fundamentos de ingeniería estructural para estudiantes de arquitectura» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Fundamentos de ingeniería estructural para estudiantes de arquitectura» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.