Mohinder S. Grewal - Global Navigation Satellite Systems, Inertial Navigation, and Integration
Здесь есть возможность читать онлайн «Mohinder S. Grewal - Global Navigation Satellite Systems, Inertial Navigation, and Integration» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Global Navigation Satellite Systems, Inertial Navigation, and Integration
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Global Navigation Satellite Systems, Inertial Navigation, and Integration: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Global Navigation Satellite Systems, Inertial Navigation, and Integration»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
GNSSs including GPS, Glonass, Galileo, BeiDou, QZSS, and IRNSS/NAViC,
and MATLAB programs on square root information filtering (SRIF)
This book provides readers with solutions to real-world problems associated with global navigation satellite systems, inertial navigation, and integration. It presents readers with numerous detailed examples and practice problems, including GNSS-aided INS, modeling of gyros and accelerometers, and SBAS and GBAS. This revised fourth edition adds new material on GPS III and RAIM. It also provides updated information on low cost sensors such as MEMS, as well as GLONASS, Galileo, BeiDou, QZSS, and IRNSS/NAViC, and QZSS. Revisions also include added material on the more numerically stable square-root information filter (SRIF) with MATLAB programs and examples from GNSS system state filters such as ensemble time filter with square-root covariance filter (SRCF) of Bierman and Thornton and SigmaRho filter.
Global Navigation Satellite Systems, Inertial Navigation, and Integration, 4th Edition Updates on the significant upgrades in existing GNSS systems, and on other systems currently under advanced development Expanded coverage of basic principles of antenna design, and practical antenna design solutions More information on basic principles of receiver design, and an update of the foundations for code and carrier acquisition and tracking within a GNSS receiver Examples demonstrating independence of Kalman filtering from probability density functions of error sources beyond their means and covariances New coverage of inertial navigation to cover recent technology developments and the mathematical models and methods used in its implementation Wider coverage of GNSS/INS integration, including derivation of a unified GNSS/INS integration model, its MATLAB implementations, and performance evaluation under simulated dynamic conditions
is intended for people who need a working knowledge of Global Navigation Satellite Systems (GNSS), Inertial Navigation Systems (INS), and the Kalman filtering models and methods used in their integration.
Global Navigation Satellite Systems, Inertial Navigation, and Integration — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Global Navigation Satellite Systems, Inertial Navigation, and Integration», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Compensation
In this case, calibration amounts to estimating the values of  and
and  , given input–output pairs
, given input–output pairs  , where
, where  is known from controlled calibration conditions and
is known from controlled calibration conditions and  is recorded under these conditions. For accelerometers, controlled conditions may include the direction and magnitude of gravity, conditions on a shake table, or those on a centrifuge. For gyroscopes, controlled conditions may include the relative direction of the rotation axis of Earth (e.g. with sensors mounted on a two‐axis indexed rotary table), or controlled conditions on a rate table.
is recorded under these conditions. For accelerometers, controlled conditions may include the direction and magnitude of gravity, conditions on a shake table, or those on a centrifuge. For gyroscopes, controlled conditions may include the relative direction of the rotation axis of Earth (e.g. with sensors mounted on a two‐axis indexed rotary table), or controlled conditions on a rate table.
The full set of input–output pairs under  sets of calibration conditions yields a system of
sets of calibration conditions yields a system of  linear equations
linear equations
(3.5) 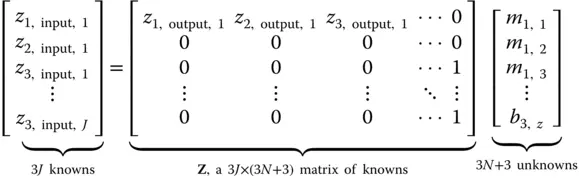
in the  unknown parameters
unknown parameters  (the elements of the matrix
(the elements of the matrix  ) and 3 unknown parameters
) and 3 unknown parameters  (rows of the 3‐vector
(rows of the 3‐vector  ), which will be overdetermined for
), which will be overdetermined for  . In that case, the system of linear equations may be solvable for the
. In that case, the system of linear equations may be solvable for the  calibration parameters by using the method of least‐squares,
calibration parameters by using the method of least‐squares,
(3.6) 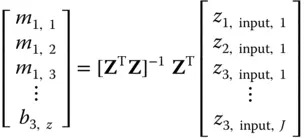
provided that the matrix  is nonsingular.
is nonsingular.
The values of  and
and  determined in this way are called calibration parameters.
determined in this way are called calibration parameters.
Estimation of the calibration parameters can also be done using Kalman filtering, a by‐product of which would be the covariance matrix of calibration parameter uncertainty. This covariance matrix is also useful in modeling system‐level performance.
3.3.4.2 Calibration Parameter Drift
INS calibration parameters may not be exactly constant over time. Their values may change significantly over the operational life of the INS. Specifications for calibration stability generally divide these calibration parameter variations into two categories:
Turn‐on to turn‐on changes that occur between a system shut‐down and the next start‐up. They may be caused by temperature transients or power turn‐on effects during shut‐downs and turn‐ons, and may represent stress relief mechanisms within materials and between assembled parts. They are generally considered to be independent from turn‐on to turn‐on, so the model for the covariance of calibration errors for the  th turn‐on would be of the form
th turn‐on would be of the form
(3.7) 
where  is the covariance of turn‐on‐to‐turn‐on parameter changes. The initial value
is the covariance of turn‐on‐to‐turn‐on parameter changes. The initial value  at the end of calibration is usually determinable from error covariance analysis of the calibration process. Note that this is the covariance model for a random walk, the covariance of which grows without bound.
at the end of calibration is usually determinable from error covariance analysis of the calibration process. Note that this is the covariance model for a random walk, the covariance of which grows without bound.
Long‐term drift, sometimes called “aging,” which has been attributed to such long‐term phenomena as material migration within solids or ion diffusion within crystalline materials. Its calibration parameter uncertainty covariance equation has the same form as Eq. (3.7), but with  now representing the calibration parameter drift in the time interval
now representing the calibration parameter drift in the time interval  between successive discrete times within an operational period.
between successive discrete times within an operational period.
Predicting Incipient System or Sensor Failures
Incipient sensor failures can possibly be predicted by observing over time the rate of change of sensor calibration parameters, depending on experience over the lifetimes of inertial navigators of the same type. One of the advantages of tightly coupled GNSS/INS integration is that INS sensors can be continuously calibrated all the time that GNSS data is available. System health monitoring can then include tests for the trends of sensor calibration parameters, setting threshold conditions for failing the INS system, and isolating a likely set of causes for the observed trends.
3.3.5 Carouseling and Indexing
Интервал:
Закладка:
Похожие книги на «Global Navigation Satellite Systems, Inertial Navigation, and Integration»
Представляем Вашему вниманию похожие книги на «Global Navigation Satellite Systems, Inertial Navigation, and Integration» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.












Обсуждение, отзывы о книге «Global Navigation Satellite Systems, Inertial Navigation, and Integration» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.