Mohinder S. Grewal - Global Navigation Satellite Systems, Inertial Navigation, and Integration
Здесь есть возможность читать онлайн «Mohinder S. Grewal - Global Navigation Satellite Systems, Inertial Navigation, and Integration» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Global Navigation Satellite Systems, Inertial Navigation, and Integration
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Global Navigation Satellite Systems, Inertial Navigation, and Integration: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Global Navigation Satellite Systems, Inertial Navigation, and Integration»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
GNSSs including GPS, Glonass, Galileo, BeiDou, QZSS, and IRNSS/NAViC,
and MATLAB programs on square root information filtering (SRIF)
This book provides readers with solutions to real-world problems associated with global navigation satellite systems, inertial navigation, and integration. It presents readers with numerous detailed examples and practice problems, including GNSS-aided INS, modeling of gyros and accelerometers, and SBAS and GBAS. This revised fourth edition adds new material on GPS III and RAIM. It also provides updated information on low cost sensors such as MEMS, as well as GLONASS, Galileo, BeiDou, QZSS, and IRNSS/NAViC, and QZSS. Revisions also include added material on the more numerically stable square-root information filter (SRIF) with MATLAB programs and examples from GNSS system state filters such as ensemble time filter with square-root covariance filter (SRCF) of Bierman and Thornton and SigmaRho filter.
Global Navigation Satellite Systems, Inertial Navigation, and Integration, 4th Edition Updates on the significant upgrades in existing GNSS systems, and on other systems currently under advanced development Expanded coverage of basic principles of antenna design, and practical antenna design solutions More information on basic principles of receiver design, and an update of the foundations for code and carrier acquisition and tracking within a GNSS receiver Examples demonstrating independence of Kalman filtering from probability density functions of error sources beyond their means and covariances New coverage of inertial navigation to cover recent technology developments and the mathematical models and methods used in its implementation Wider coverage of GNSS/INS integration, including derivation of a unified GNSS/INS integration model, its MATLAB implementations, and performance evaluation under simulated dynamic conditions
is intended for people who need a working knowledge of Global Navigation Satellite Systems (GNSS), Inertial Navigation Systems (INS), and the Kalman filtering models and methods used in their integration.
Global Navigation Satellite Systems, Inertial Navigation, and Integration — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Global Navigation Satellite Systems, Inertial Navigation, and Integration», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
3.4.4.2 Gravitational Acceleration
Gravitational acceleration is the negative gradient of gravitational potential. Potential is a scalar function, and its gradient is a vector. Because gravitational potential increases with altitude, its gradient points upward and the negative gradient points downward.
3.4.4.3 Equipotential Surfaces
An equipotential surface is a surface of constant gravitational potential. If the ocean and atmosphere were not moving, then the surface of the ocean at static equilibrium would be an equipotential surface. Mean sea level is a theoretical equipotential surface obtained by time‐averaging the dynamic effects. Orthometric altitude is measured along the (curved) plumbline.
WGS84 Ellipsoid
The WGS84 Earth model approximates mean sea level (an equipotential surface) by an ellipsoid of revolution with its rotation axis coincident with the rotation axis of the Earth, its center at the center of mass of the Earth, and its prime meridian through Greenwich. Its semimajor axis (equatorial radius) is defined to be 6 378 137 m, and its semiminor axis (polar radius) is defined to be 6 356 752.3142 m.
Geoid Models
Geoids are approximations of mean sea‐level orthometric height with respect to a reference ellipsoid. Geoids are defined by additional higher‐order shapes, commonly modeled by spherical harmonics of height deviations from an ellipsoid, as illustrated in Figure 3.8. There are many geoid models based on different data, but the more recent, most accurate models depend heavily on GPS data. Geoid heights deviate from reference ellipsoids by tens of meters, typically.
The WGS84 geoid heights vary about  100 m from the reference ellipsoid. As a rule, oceans tend to have lower geoid heights and continents tend to have higher geoid heights. Coarse 20‐m contour intervals are plotted versus longitude and latitude in Figure 3.9, with geoid regions above the ellipsoid shaded gray.
100 m from the reference ellipsoid. As a rule, oceans tend to have lower geoid heights and continents tend to have higher geoid heights. Coarse 20‐m contour intervals are plotted versus longitude and latitude in Figure 3.9, with geoid regions above the ellipsoid shaded gray.
3.4.4.4 Longitude and Latitude Rates
The second integral of acceleration in locally level coordinates should result in the estimated vehicle position. This integral is somewhat less than straightforward when longitude and latitude are the preferred horizontal location variables.
The rate of change of vehicle altitude equals its vertical velocity, which is the first integral of net (i.e. including gravity) vertical acceleration. The rates of change of vehicle longitude and latitude depend on the horizontal components of vehicle velocity, but in a less direct manner. The relationship between longitude and latitude rates and east and north velocities is further complicated by the oblate shape of the Earth.
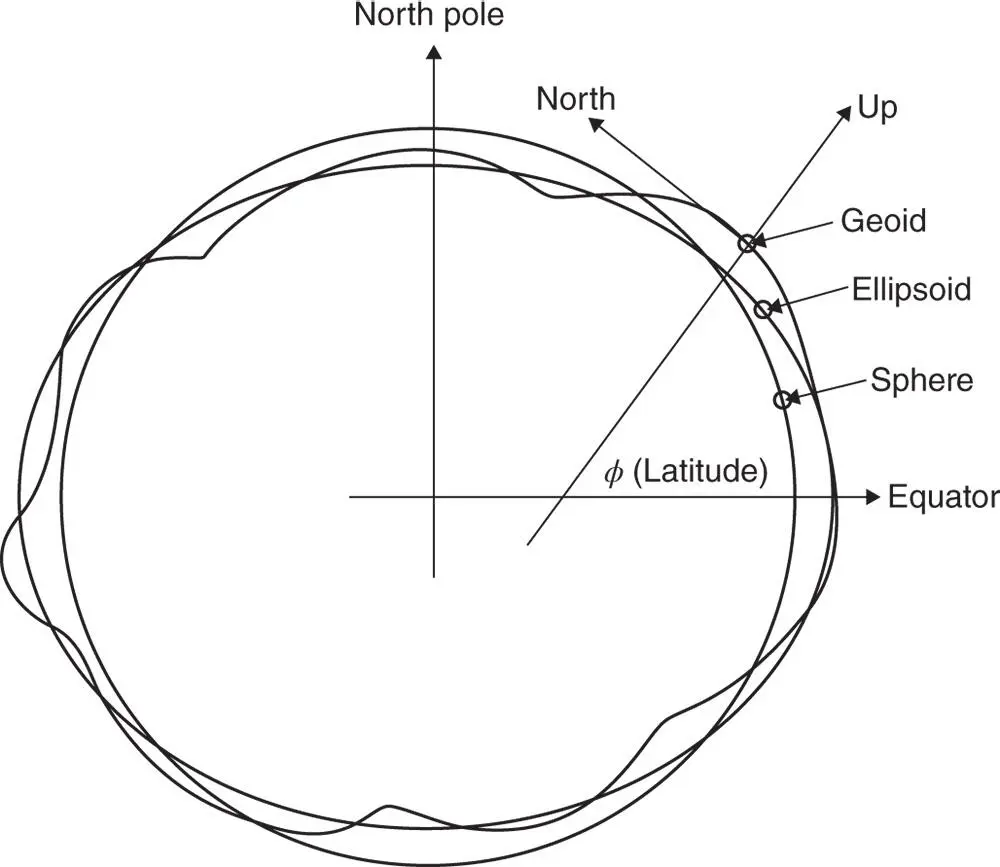
Figure 3.8Equipotential surface models for Earth.
The rates at which these angular coordinates change as the vehicle moves tangent to the surface will depend upon the radius of curvature of the reference surface model. Radius of curvature can depend on the direction of travel, and for an ellipsoidal model there is one radius of curvature for north–south motion and another radius of curvature for east–west motion.
Meridional Radius of Curvature
The radius of curvature for north–south motion is called the “meridional” radius of curvature, because north–south travel is along a meridian (i.e. line of constant longitude). For an ellipsoid of revolution, all meridians have the same shape, which is that of the ellipse that was rotated to produce the ellipsoidal surface model. The tangent circle with the same radius of curvature as the ellipse is called the “ osculating circle ” (osculating means “kissing”). As illustrated in Figure 3.10for an oblate Earth model, the radius of the meridional osculating circle is smallest where the geocentric radius is largest (at the equator), and the radius of the osculating circle is largest where the geocentric radius is smallest (at the poles). The osculating circle lies inside or on the ellipsoid at the equator and outside or on the ellipsoid at the poles and passes through the ellipsoid surface for latitudes in between.
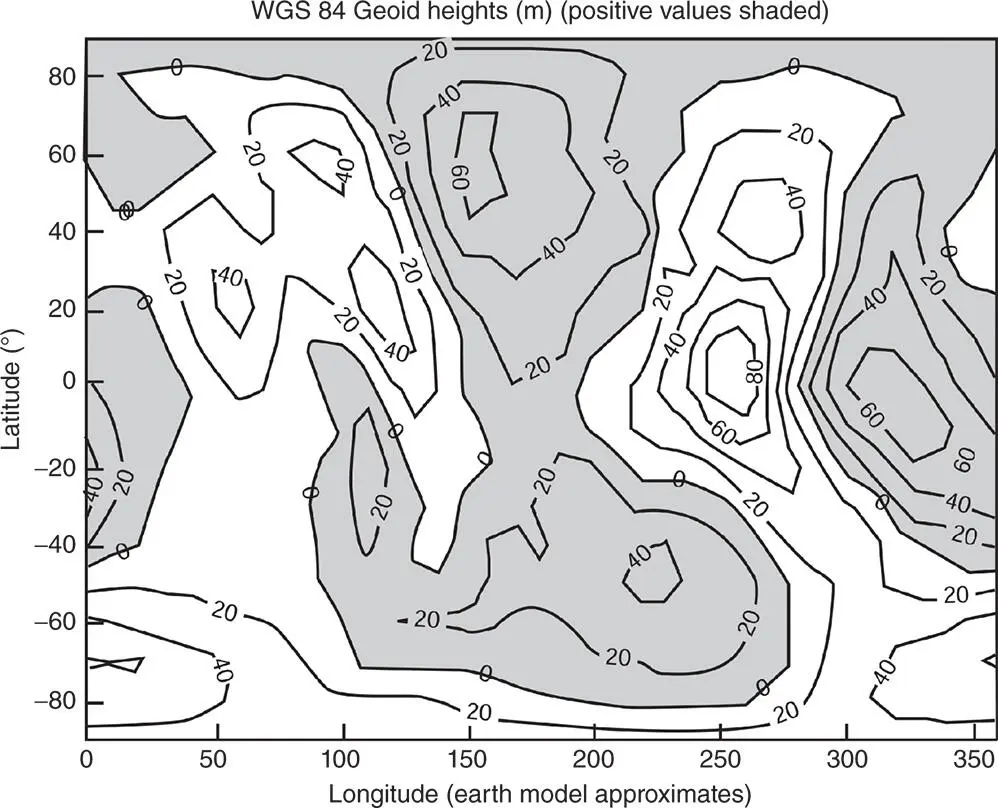
Figure 3.9WGS84 geoid heights.
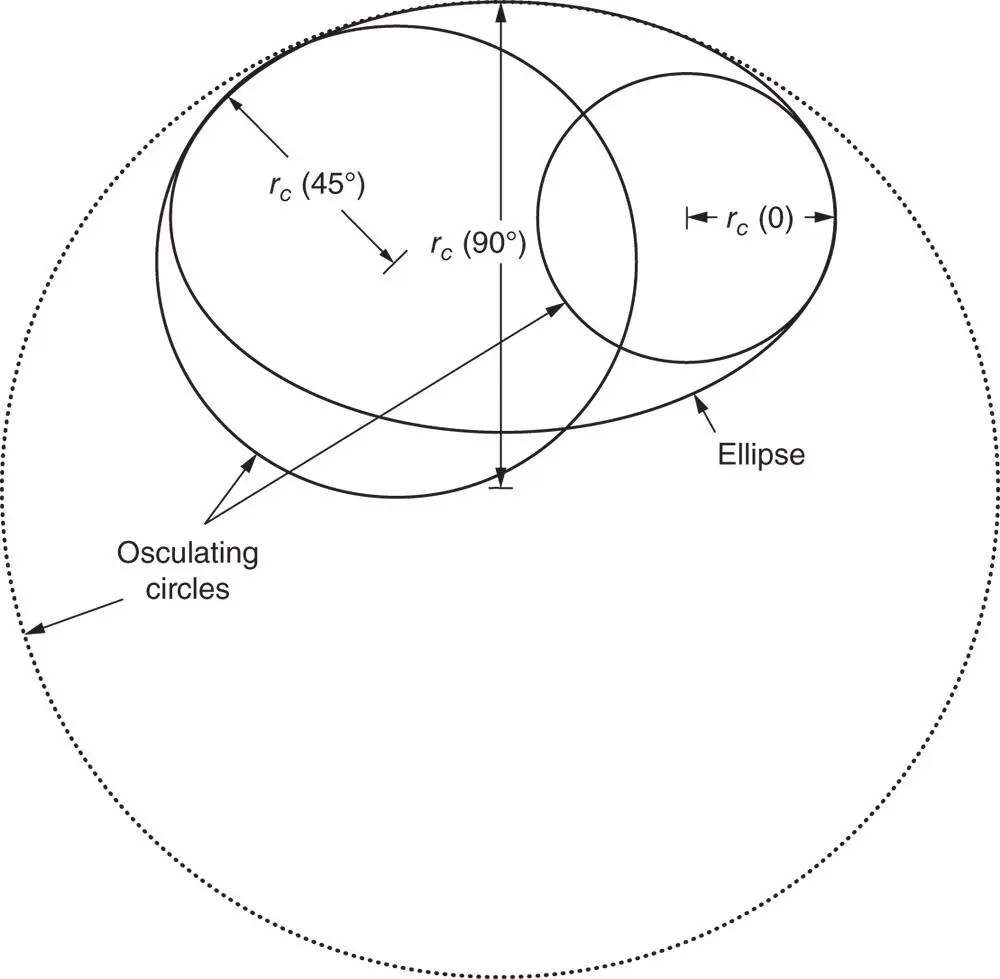
Figure 3.10Ellipse and osculating circles.
The formula for meridional radius of curvature as a function of geodetic latitude (  is
is
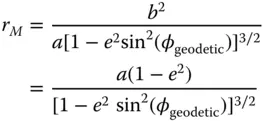
where  is the semimajor axis of the ellipse,
is the semimajor axis of the ellipse,  is the semiminor axis, and
is the semiminor axis, and  = (
= (  –
–  /
/  is the eccentricity squared.
is the eccentricity squared.
Geodetic Latitude Rate
The rate of change of geodetic latitude as a function of north velocity is then
(3.9) 
and geodetic latitude can be maintained as the integral
(3.10) 
where  is height above (+) or below (
is height above (+) or below (  ) the ellipsoid surface and
) the ellipsoid surface and  will be in radians if
will be in radians if  is in meters per second and
is in meters per second and  and
and  are in meters.
are in meters.
Интервал:
Закладка:
Похожие книги на «Global Navigation Satellite Systems, Inertial Navigation, and Integration»
Представляем Вашему вниманию похожие книги на «Global Navigation Satellite Systems, Inertial Navigation, and Integration» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.












Обсуждение, отзывы о книге «Global Navigation Satellite Systems, Inertial Navigation, and Integration» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.