Mohinder S. Grewal - Global Navigation Satellite Systems, Inertial Navigation, and Integration
Здесь есть возможность читать онлайн «Mohinder S. Grewal - Global Navigation Satellite Systems, Inertial Navigation, and Integration» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Global Navigation Satellite Systems, Inertial Navigation, and Integration
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Global Navigation Satellite Systems, Inertial Navigation, and Integration: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Global Navigation Satellite Systems, Inertial Navigation, and Integration»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
GNSSs including GPS, Glonass, Galileo, BeiDou, QZSS, and IRNSS/NAViC,
and MATLAB programs on square root information filtering (SRIF)
This book provides readers with solutions to real-world problems associated with global navigation satellite systems, inertial navigation, and integration. It presents readers with numerous detailed examples and practice problems, including GNSS-aided INS, modeling of gyros and accelerometers, and SBAS and GBAS. This revised fourth edition adds new material on GPS III and RAIM. It also provides updated information on low cost sensors such as MEMS, as well as GLONASS, Galileo, BeiDou, QZSS, and IRNSS/NAViC, and QZSS. Revisions also include added material on the more numerically stable square-root information filter (SRIF) with MATLAB programs and examples from GNSS system state filters such as ensemble time filter with square-root covariance filter (SRCF) of Bierman and Thornton and SigmaRho filter.
Global Navigation Satellite Systems, Inertial Navigation, and Integration, 4th Edition Updates on the significant upgrades in existing GNSS systems, and on other systems currently under advanced development Expanded coverage of basic principles of antenna design, and practical antenna design solutions More information on basic principles of receiver design, and an update of the foundations for code and carrier acquisition and tracking within a GNSS receiver Examples demonstrating independence of Kalman filtering from probability density functions of error sources beyond their means and covariances New coverage of inertial navigation to cover recent technology developments and the mathematical models and methods used in its implementation Wider coverage of GNSS/INS integration, including derivation of a unified GNSS/INS integration model, its MATLAB implementations, and performance evaluation under simulated dynamic conditions
is intended for people who need a working knowledge of Global Navigation Satellite Systems (GNSS), Inertial Navigation Systems (INS), and the Kalman filtering models and methods used in their integration.
Global Navigation Satellite Systems, Inertial Navigation, and Integration — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Global Navigation Satellite Systems, Inertial Navigation, and Integration», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Theoretically, one can recover the sensor input from the sensor output so long as the input–output relationship is known and invertible. Lock‐in (or “dead zone”) errors and quantization errors are the only ones shown with this problem. The cumulative effects of both types (lock‐in and quantization) often benefit from zero‐mean input noise or dithering. Also, not all digitization methods have equal cumulative effects. Cumulative quantization errors for sensors with frequency outputs are bounded by  one‐half least significant bit (LSB) of the digitized output, but the variance of cumulative errors from independent sample‐to‐sample A/D conversion errors can grow linearly with time.
one‐half least significant bit (LSB) of the digitized output, but the variance of cumulative errors from independent sample‐to‐sample A/D conversion errors can grow linearly with time.
In inertial navigation, integration turns white noise into random walks.
3.3.3.3 Error Compensation
The accuracy demands on sensors used in inertial navigation cannot always be met within the tolerance limits of manufacturing, but can often be met by calibrating those errors after manufacture and using the results to compensate them during operation. Calibration is the process of characterizing the sensor output, given its input. Sensor error compensation is the process of determining the sensor input, given its output. Sensor design is all about making that process easier. Another problem is that any apparatus using physical phenomena that might be used to sense rotation or acceleration may also be sensitive to other phenomena, as well. Many sensors also function as thermometers, for example.
Figure 3.6is a schematic of such an error compensation procedure, using the example of a gyroscope that is also sensitive to acceleration and temperature (not an unusual situation). The first problem is to determine the input–output function

where the ellipsis “  ” allows for the effects of more variables to be compensated. The functional characterization is usually done using a set of controlled input values and measured output values. The next problem is to determine its inverse,
” allows for the effects of more variables to be compensated. The functional characterization is usually done using a set of controlled input values and measured output values. The next problem is to determine its inverse,

and use it with independently sensed values for the variables involved –  (sensor output),
(sensor output),  (compensated accelerometer output) and
(compensated accelerometer output) and  (temperature) in this example.
(temperature) in this example.
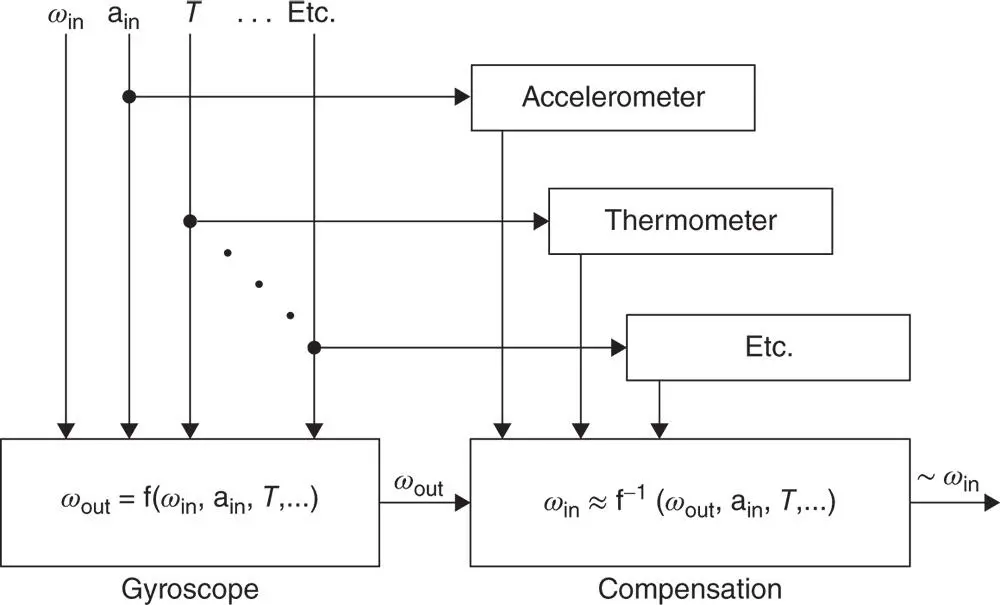
Figure 3.6Gyro error compensation example.
If the input–output function  is common to all sensors of the same design, then this only has to be done once. Otherwise, it can become expensive.
is common to all sensors of the same design, then this only has to be done once. Otherwise, it can become expensive.
There are also methods using nonlinear Kalman filtering and auxiliary sensor aiding for tracking and updating compensation parameters that may drift over time.
3.3.4 Inertial Sensor Assembly (ISA) Calibration
The individual sensor input axes within an inertial sensor assembly (ISA) must be aligned to a common reference frame, and this can be combined with sensor‐level calibration of all sensor compensation parameters, as illustrated in Figure 3.5. Figure 3.7illustrates how input axis misalignments and scale factors at the ISA level affect sensor outputs, in terms of how they are related to the linear input–output model,
(3.1) 
(3.2) 
where  is a vector representing the inputs (accelerations or rotation rates) to three inertial sensors with nominally orthogonal input axes,
is a vector representing the inputs (accelerations or rotation rates) to three inertial sensors with nominally orthogonal input axes,  is a vector representing the corresponding outputs,
is a vector representing the corresponding outputs,  is a vector of sensor output biases, and the corresponding elements of
is a vector of sensor output biases, and the corresponding elements of  are labeled in Figure 3.7.
are labeled in Figure 3.7.
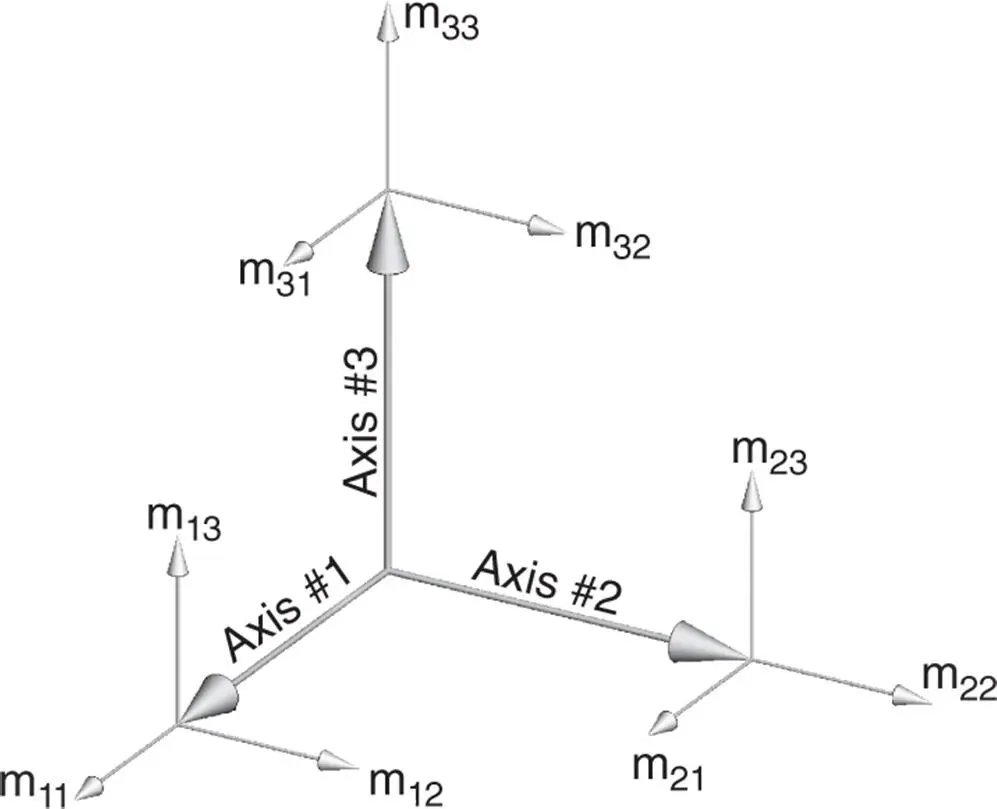
Figure 3.7Directions of modeled sensor cluster errors.
3.3.4.1 ISA Calibration Parameters
The parameters  and
and  of this model can be estimated from observations of sensor outputs when the inputs are known, the process called calibration.
of this model can be estimated from observations of sensor outputs when the inputs are known, the process called calibration.
The purpose of calibration is sensor compensation, which is essentially inverting the input‐output of Equation 3.1to obtain
(3.3) 
the sensor inputs compensated for scale factor, misalignment, and bias errors.
This result can be generalized for a cluster of  gyroscopes or accelerometers, the effects of individual biases, scale factors, and input axis misalignmentscan be modeled by an equation of the form
gyroscopes or accelerometers, the effects of individual biases, scale factors, and input axis misalignmentscan be modeled by an equation of the form
(3.4) 
where  is the Moore–Penrose pseudoinverse of the corresponding
is the Moore–Penrose pseudoinverse of the corresponding  , which can be determined by calibration.
, which can be determined by calibration.
Интервал:
Закладка:
Похожие книги на «Global Navigation Satellite Systems, Inertial Navigation, and Integration»
Представляем Вашему вниманию похожие книги на «Global Navigation Satellite Systems, Inertial Navigation, and Integration» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.












Обсуждение, отзывы о книге «Global Navigation Satellite Systems, Inertial Navigation, and Integration» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.