Mohinder S. Grewal - Global Navigation Satellite Systems, Inertial Navigation, and Integration
Здесь есть возможность читать онлайн «Mohinder S. Grewal - Global Navigation Satellite Systems, Inertial Navigation, and Integration» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Global Navigation Satellite Systems, Inertial Navigation, and Integration
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Global Navigation Satellite Systems, Inertial Navigation, and Integration: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Global Navigation Satellite Systems, Inertial Navigation, and Integration»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
GNSSs including GPS, Glonass, Galileo, BeiDou, QZSS, and IRNSS/NAViC,
and MATLAB programs on square root information filtering (SRIF)
This book provides readers with solutions to real-world problems associated with global navigation satellite systems, inertial navigation, and integration. It presents readers with numerous detailed examples and practice problems, including GNSS-aided INS, modeling of gyros and accelerometers, and SBAS and GBAS. This revised fourth edition adds new material on GPS III and RAIM. It also provides updated information on low cost sensors such as MEMS, as well as GLONASS, Galileo, BeiDou, QZSS, and IRNSS/NAViC, and QZSS. Revisions also include added material on the more numerically stable square-root information filter (SRIF) with MATLAB programs and examples from GNSS system state filters such as ensemble time filter with square-root covariance filter (SRCF) of Bierman and Thornton and SigmaRho filter.
Global Navigation Satellite Systems, Inertial Navigation, and Integration, 4th Edition Updates on the significant upgrades in existing GNSS systems, and on other systems currently under advanced development Expanded coverage of basic principles of antenna design, and practical antenna design solutions More information on basic principles of receiver design, and an update of the foundations for code and carrier acquisition and tracking within a GNSS receiver Examples demonstrating independence of Kalman filtering from probability density functions of error sources beyond their means and covariances New coverage of inertial navigation to cover recent technology developments and the mathematical models and methods used in its implementation Wider coverage of GNSS/INS integration, including derivation of a unified GNSS/INS integration model, its MATLAB implementations, and performance evaluation under simulated dynamic conditions
is intended for people who need a working knowledge of Global Navigation Satellite Systems (GNSS), Inertial Navigation Systems (INS), and the Kalman filtering models and methods used in their integration.
Global Navigation Satellite Systems, Inertial Navigation, and Integration — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Global Navigation Satellite Systems, Inertial Navigation, and Integration», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Inertial sensor assemblies(ISAs) are ensembles of inertial sensors rigidly mounted to a common base to maintain the same relative orientations, as illustrated in Figure 3.1.
ISAs used in inertial navigation usually contain three accelerometers and three gyroscopes, represented in the figure by lettered blocks with arrows representing their respective input axes, or an equivalent configuration using multi‐axis sensors. However, ISAs used for some other purposes (e.g. dynamic control applications such as autopilots or automotive steering augmentation) may not need as many sensors, and some designs use redundant sensors. Other terms used for the ISA are instrument clusterand (for inertially stabilized implementations) stable elementor stable platform.
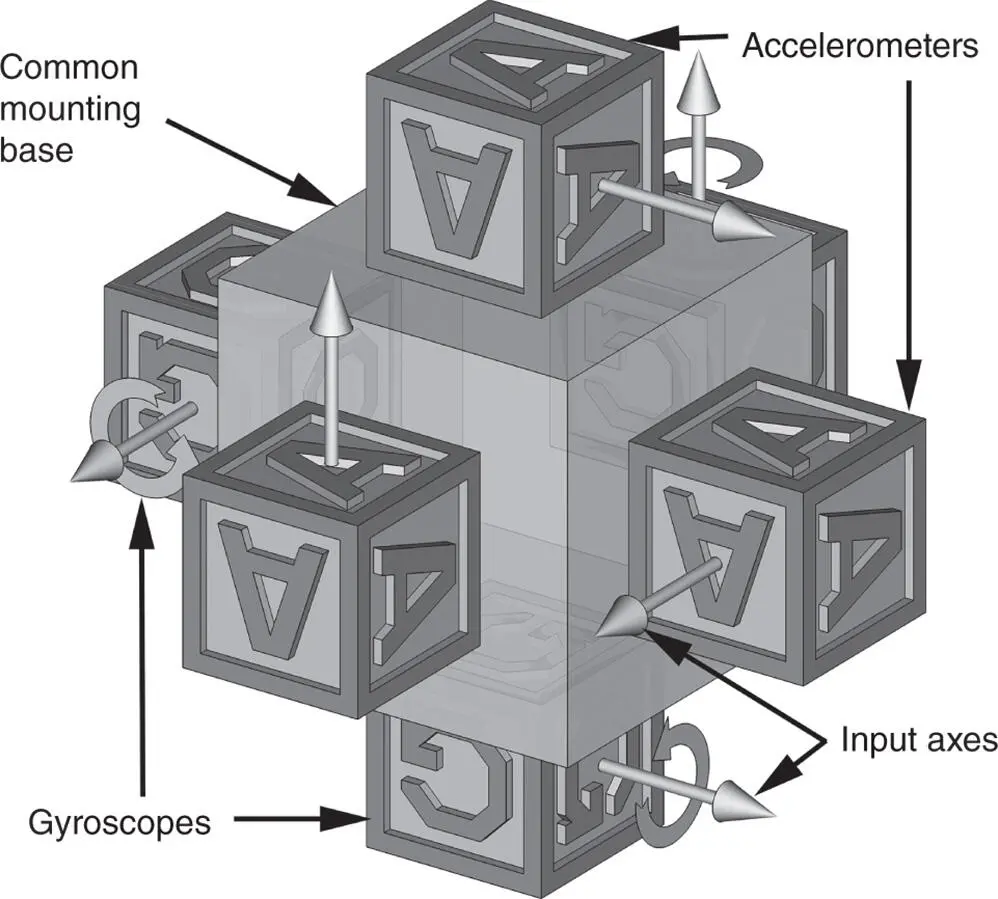
Figure 3.1Inertial sensor assembly (ISA) components.
Inertial reference unit(IRU) is a term commonly used for inertial sensor system for attitude information only (i.e. using only gyroscopes). Space‐based telescopes, for example, do not generally need acccelerometers, but they do need gyroscopes to keeping track of orientation.
Inertial measurement units(IMUs) include ISAs and associated support electronics for calibration and control of the ISA. Support electronics may also include thermal control or compensation, signal conditioning and input–output control. An IMU may also include an IMU processor, and – for inertially stabilized systems – the gimbal control electronics.
Inertial navigation systems(INS) measure rotation rates and accelerations, and calculate attitude, velocity, and position. Its subsystems include:
IMUs,already mentioned earlier.
Navigation computers(one or more) to calculate the gravitational acceleration (not measured by accelerometers) and process the outputs of the accelerometers and gyroscopes from the IMU to maintain an estimate of the position of the IMU. Intermediate results of the implementation method usually include estimates of velocity, attitude, and attitude rates of the IMU.
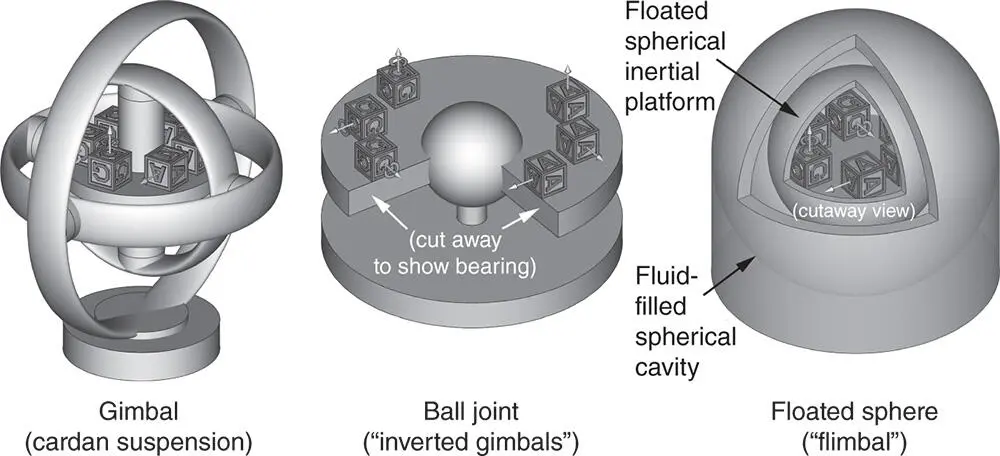
Figure 3.2Inertially stabilized IMU alternatives.
User interfaces,such as display consoles for human operators and analog and/or digital data interfaces for vehicle guidance and control functions.
Power suppliesand/or raw power conditioning for the complete INS.
Implementationsof inertial navigation systems include two general types:
Strapdownsystems do nothing to physically control the orientation of the ISA, but they do process the gyroscope outputs to keep track of its orientation with respect to navigation coordinates. A strapdown system is usually attached to its host vehicle so it can keep track of its host vehicle orientation with respect to navigation coordinates.
Inertially stabilizedsystems use their gyroscopes for controlling ISA attitude, as illustrated in Fig 3.2a–c. This shows three alternative structures that have been tried at different times:
Gimbals,also called a Cardan 2 suspension. This was the most popular implementation using hardware to solve the attitude problem. The US Navy's Electrostatically Supported Gyro Navigator (ESGN) is a gimbaled system, and possibly the most accurate INS for long‐term inertial navigation.
Ball‐joint,which Fritz Mueller called “inverted gimbals” [3]. It is only useful for applications with limited rotational freedom in pitch and roll, such as for ships in lesser sea states. It has not become popular, perhaps because of the difficulties of applying controlled torques about the spherical bearing to stabilize the ISA.
Floatedsystems, a configuration also called a “FLIMBAL” system, an acronym for floated inertial measurement ball. The advanced inertial reference sphere (AIRS) inertial navigator for the US Air Force LGM‐30G Minuteman III ICBM is a floated system. Despite the difficulties of transferring power, signals, heat, torque, and relative attitude between the housing and the inner spherical ISA, AIRS is probably the most accurate (and expensive) inertial navigator for high‐g rocket booster applications.
In all three cases, the rotation‐isolated ISA is also called an inertial platform, stable platform , or stable element . The IMU in this case may include the ISA, the gimbal/float structure and all associated electronics (e.g. gimbal wiring, rotary slip rings, gimbal bearing angle encoders, signal conditioning, gimbal bearing torque motors, and thermal control).
Commonly used inertially stabilized ISA orientations in terrestrial applications include:
Inertially fixed (non‐rotating), a common orientation for operations in space. In this case, the ISA may include one or more star trackers to correct for any gyroscope errors. However, locally level implementations may also use star trackers for the same purpose.
Locally level, a common orientation for terrestrial navigation. In this case, the ISA rotates with the Earth, and keeps two of its reference axes locally level during horizontal motion over the surface. Some early systems aligned the gyro and accelerometer input axes with the local directions of north, east, and down, because the gimbal angles could then represent the Euler angles for heading (yaw), pitch, and roll of the vehicle. However, there are also advantages in allowing the locally stabilized element to physically rotate about the local vertical direction.
Inertially stabilized systems are generally more expensive than strapdown systems, but their performance is usually better. This is due, in part, to the fact that their gyroscopes and accelerometers are not required to endure high rotation rates.
“Host vehicle” refers to the transportation system using INS for navigation. It could be a spacecraft, aircraft, surface ship, submarine, land vehicle, or pack animal (including humans).
Shock and vibration isolation . High‐frequency dynamic forces acting on the host vehicle (e.g. from propulsion noise, bumpy terrain, turbulence, or impacts) can excite elastic waves and vibrations in the host vehicle that are transmitted through the vehicle frame to the INS through its mounting hardware. The resulting zero‐mean high‐frequency inputs to the inertial sensors should not influence the navigation solution significantly, but they can create numerical errors in the real‐time computer methods used for integrating attitude rates and acceleration, and they can damage the sensors used. These effects can be mitigated at the interface between INS and host by using shock and vibration isolators (generally made from “lossy” elastomers) to dampen the high‐frequency components of contact forces.
Because inertial navigation systems perform integrals of acceleration and attitude rates, these integrals need initial values.
Initialization is a procedure for obtaining an initial value of the navigation solution.
Rotational orientation or attitude refers to the angular pose of a rigid object in three‐dimensional space relative to the axes of a coordinate system.
Alignment is a procedure used for establishing the initial value of the rotational orientation of the ISA relative to navigation coordinates. Inertial systems with sufficiently accurate sensors can perform self‐alignmentwhen the system is sufficiently stationary with respect to the Earth. In that case, the implementation can be divided into two parts:
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Global Navigation Satellite Systems, Inertial Navigation, and Integration»
Представляем Вашему вниманию похожие книги на «Global Navigation Satellite Systems, Inertial Navigation, and Integration» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.












Обсуждение, отзывы о книге «Global Navigation Satellite Systems, Inertial Navigation, and Integration» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.