Mohinder S. Grewal - Global Navigation Satellite Systems, Inertial Navigation, and Integration
Здесь есть возможность читать онлайн «Mohinder S. Grewal - Global Navigation Satellite Systems, Inertial Navigation, and Integration» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Global Navigation Satellite Systems, Inertial Navigation, and Integration
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Global Navigation Satellite Systems, Inertial Navigation, and Integration: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Global Navigation Satellite Systems, Inertial Navigation, and Integration»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
GNSSs including GPS, Glonass, Galileo, BeiDou, QZSS, and IRNSS/NAViC,
and MATLAB programs on square root information filtering (SRIF)
This book provides readers with solutions to real-world problems associated with global navigation satellite systems, inertial navigation, and integration. It presents readers with numerous detailed examples and practice problems, including GNSS-aided INS, modeling of gyros and accelerometers, and SBAS and GBAS. This revised fourth edition adds new material on GPS III and RAIM. It also provides updated information on low cost sensors such as MEMS, as well as GLONASS, Galileo, BeiDou, QZSS, and IRNSS/NAViC, and QZSS. Revisions also include added material on the more numerically stable square-root information filter (SRIF) with MATLAB programs and examples from GNSS system state filters such as ensemble time filter with square-root covariance filter (SRCF) of Bierman and Thornton and SigmaRho filter.
Global Navigation Satellite Systems, Inertial Navigation, and Integration, 4th Edition Updates on the significant upgrades in existing GNSS systems, and on other systems currently under advanced development Expanded coverage of basic principles of antenna design, and practical antenna design solutions More information on basic principles of receiver design, and an update of the foundations for code and carrier acquisition and tracking within a GNSS receiver Examples demonstrating independence of Kalman filtering from probability density functions of error sources beyond their means and covariances New coverage of inertial navigation to cover recent technology developments and the mathematical models and methods used in its implementation Wider coverage of GNSS/INS integration, including derivation of a unified GNSS/INS integration model, its MATLAB implementations, and performance evaluation under simulated dynamic conditions
is intended for people who need a working knowledge of Global Navigation Satellite Systems (GNSS), Inertial Navigation Systems (INS), and the Kalman filtering models and methods used in their integration.
Global Navigation Satellite Systems, Inertial Navigation, and Integration — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Global Navigation Satellite Systems, Inertial Navigation, and Integration», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
2.3.4.1 Four Satellites
For simplicity, consider four satellite measurements. The best accuracy is found with three satellites equally spaced on the horizon, at minimum elevation angle, with the fourth satellite directly overhead, as listed in Table 2.1.
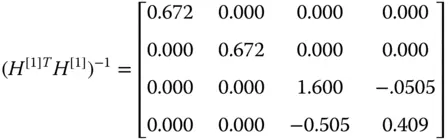
The diagonal of the unscaled covariance matrix ( H [1]T H [1]) −1then has the terms

where

Table 2.1Example with four satellites.
| Satellite location | ||||
| 1 | 2 | 3 | 4 | |
| Elevation (°) | 5 | 5 | 5 | 90 |
| Azimuth (°) | 0 | 120 | 240 | 0 |
Typical example values of H [1]for this geometry are
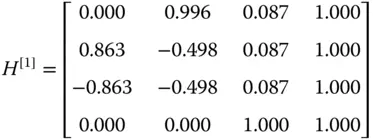
The GDOP calculations for this example are
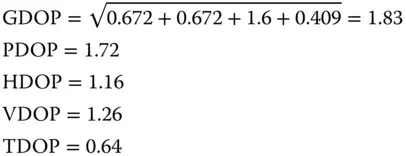
Gdop.m calculates the GDOP for the chosen constellation for GPS_perf.m by calculating H [1]matrix calcH. See Appendix A on www.wiley.com/go/grewal/gnss.
2.4 Time and GPS
2.4.1 Coordinated Universal Time (UTC) Generation
Coordinated universal time (UTC) is the timescale based on the atomic second but is occasionally corrected by the insertion of leap seconds so as to keep it approximately synchronized with the Earth's rotation. The leap second adjustments keep UTC within 0.9 seconds of UT1, which is a timescale based on the Earth's axial spin. UT1 is a measure of the true angular orientation of the Earth in space. Because the Earth does not spin at exactly a constant rate, UT1 is not a uniform timescale [5].
2.4.2 GPS System Time
The timescale to which GPS signals are referenced is referred to as GPS time . GPS time is derived from a composite or “paper” clock that consists of all operational monitor station and satellite atomic clocks. Over the long run, it is steered to keep it within about 90 nanoseconds (1 σ ) of UTC, as maintained by the master clock at the US Naval Observatory, ignoring the UTC leap seconds. At the integer second level, GPS time equaled UTC in 1980. However, due to the leap seconds that have been inserted into UTC, GPS time was ahead of UTC by 18 seconds after September 2019.
2.4.3 Receiver Computation of UTC
The parameters needed to calculate UTC from GPS time are found in subframe 4 of the navigation data message. These data include a notice to the user regarding the scheduled future or recent past (relative to the navigation message upload) value of the delta time due to leap seconds Δ t LFS, together with the week number WN LFSand the day number DN, at the end of which the leap second becomes effective. The latter two quantities are known as the effectivity time of the leap second. “Day one” is defined as the first day relative to the end/start of a week, and the WN LFSvalue consists of the eight least significant bits (LSBs) of the full week number.
Three different UTC/GPS time relationships exist, depending on the relationship of the effectivity time to the user's current GPS time:
1 First case. Whenever the effectivity time indicated by the WNLFS and WN values is not in the past relative to the user's present GPS time, and the user's present time does not fall in the time span starting at DN + 3/4 and ending at DN + 5/4, the UTC time is calculated aswhere tUTC is in seconds; 86 400 is the number of seconds per day; andwhere 604 800 is the number of seconds per week andtE=user GPS time from start of week (seconds)ΔTLS=delta time due to leap secondsA0=a constant polynomial term from the ephemeris messageA1=a first‐order polynomial term from the ephemeris messaget0t=reference time for UTC dateWN=current week number derived from subframe 1WNt=UTC reference week numberThe user GPS time tE is in seconds relative to the end/start of the week, and the reference time t0t for UTC data is referenced to the start of that week, whose number WNt is given in word 8 of page 18 in subframe 4. The WNt value consists of the eight LSBs of the full week number. Thus, the user must account for the truncated nature of this parameter as well as truncation of WN, WNt, and WNLFS due to the rollover of the full week number. These parameters are managed by the GPS control segment so that the absolute value of the difference between the untruncated WN and WNt values does not exceed 127.
2 Second case. Whenever the user's current GPS time falls within the time span from DN +3/4 to DN +5/4, proper accommodation of the leap second event with a possible week number transition is provided by the following expression for UTC:whereand the definition of ΔtUTC given previously applies throughout the transition period.
3 Third case. Whenever the effectivity time of the leap second event, as indicated by the WNLFS and DN values, is in the past relative to the user's current GPS time, the expression given for tUTC in the first case earlier is valid except that the value of ΔtLFS is used instead of ΔtLS. The GPS control segment coordinates the update of UTC parameters at a future upload in order to maintain a proper continuity of the tUTC timescale.
2.5 Example: User Position Calculations with No Errors
2.5.1 User Position Calculations
This section demonstrates how to go about calculating the user position, given ranges (pseudoranges) to satellites, the known positions of the satellites, and ignoring the effects of clock errors, receiver errors, propagation errors, and so on.
Then, the pseudoranges will be used to calculate the user's antenna location.
2.5.1.1 Position Calculations
Neglecting clock errors, let us first determine the position calculation with no errors:
| ρ r | = | pseudorange (known) |
| x , y , z | = | satellite position coordinates (known), in ECEF |
| X , Y , Z | = | user position coordinates (unknown) |
where x , y , z , X , Y , Z are in the ECEF coordinate system. (It can be converted to ENU.)
Position calculation with no errors is
(2.36) 
Squaring both sides yields
(2.37) 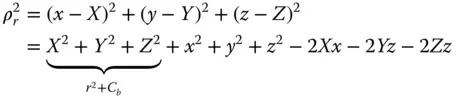
(2.38) 
where r equals the radius of the Earth and C bis the clock bias correction. The four unknowns are ( X , Y , Z, C b). Satellite position ( x , y , z ) is calculated from ephemeris data. For four satellites, Eq. (2.38)becomes
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Global Navigation Satellite Systems, Inertial Navigation, and Integration»
Представляем Вашему вниманию похожие книги на «Global Navigation Satellite Systems, Inertial Navigation, and Integration» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.












Обсуждение, отзывы о книге «Global Navigation Satellite Systems, Inertial Navigation, and Integration» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.