Mohinder S. Grewal - Global Navigation Satellite Systems, Inertial Navigation, and Integration
Здесь есть возможность читать онлайн «Mohinder S. Grewal - Global Navigation Satellite Systems, Inertial Navigation, and Integration» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Global Navigation Satellite Systems, Inertial Navigation, and Integration
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Global Navigation Satellite Systems, Inertial Navigation, and Integration: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Global Navigation Satellite Systems, Inertial Navigation, and Integration»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
GNSSs including GPS, Glonass, Galileo, BeiDou, QZSS, and IRNSS/NAViC,
and MATLAB programs on square root information filtering (SRIF)
This book provides readers with solutions to real-world problems associated with global navigation satellite systems, inertial navigation, and integration. It presents readers with numerous detailed examples and practice problems, including GNSS-aided INS, modeling of gyros and accelerometers, and SBAS and GBAS. This revised fourth edition adds new material on GPS III and RAIM. It also provides updated information on low cost sensors such as MEMS, as well as GLONASS, Galileo, BeiDou, QZSS, and IRNSS/NAViC, and QZSS. Revisions also include added material on the more numerically stable square-root information filter (SRIF) with MATLAB programs and examples from GNSS system state filters such as ensemble time filter with square-root covariance filter (SRCF) of Bierman and Thornton and SigmaRho filter.
Global Navigation Satellite Systems, Inertial Navigation, and Integration, 4th Edition Updates on the significant upgrades in existing GNSS systems, and on other systems currently under advanced development Expanded coverage of basic principles of antenna design, and practical antenna design solutions More information on basic principles of receiver design, and an update of the foundations for code and carrier acquisition and tracking within a GNSS receiver Examples demonstrating independence of Kalman filtering from probability density functions of error sources beyond their means and covariances New coverage of inertial navigation to cover recent technology developments and the mathematical models and methods used in its implementation Wider coverage of GNSS/INS integration, including derivation of a unified GNSS/INS integration model, its MATLAB implementations, and performance evaluation under simulated dynamic conditions
is intended for people who need a working knowledge of Global Navigation Satellite Systems (GNSS), Inertial Navigation Systems (INS), and the Kalman filtering models and methods used in their integration.
Global Navigation Satellite Systems, Inertial Navigation, and Integration — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Global Navigation Satellite Systems, Inertial Navigation, and Integration», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
2 Fundamentals of Satellite Navigation Systems
2.1 Chapter Focus
This chapter presents a concise system‐level overview of constellations, operational configurations, and signaling characteristics of a global navigation satellite system (GNSS). Various GNSSs have been developed over the decades to fulfill user position, velocity, and timing (PVT) application requirements. More detailed coverage of the essential technical details of various GNSSs is presented in Chapters 4–9.
2.2 Satellite Navigation Systems Considerations
Since the early days of satellite‐based navigation systems, they have operated independently and have been integrated with other radionavigation systems, as well as internal systems to increase the robustness of the PVT solution. While radionavigation systems, including GNSS, provide good accuracy, these types of systems may be vulnerable to interference and periods of unavailability. On the other hand, while inertial navigation systems are self‐contained, their accuracy degrades over time. The integration of these two complementary sensor systems enables the position navigation timing (PNT) engineer to implement a robust PVT solution for a variety of applications.
2.2.1 Systems Other than GNSS
In many parts of the Globe, GNSS signals have replaced other terrestrial radionavigation systems, such as long‐range navigation‐version C (LORAN‐C) signals produced by three or more LORAN signal sources positioned at fixed, known terrestrial locations for outside‐the‐building location determination. A LORAN‐C system relies on a plurality of ground‐based signal towers, preferably spaced 100–300 km apart, that transmit distinguishable electromagnetic signals that are received and processed by an LORAN receiver system. A representative LORAN‐C system is discussed in the US DOT LORAN‐C User Handbook [1]. LORAN‐C signals use carrier frequencies of the order of 100 kHz and have maximum reception distances of hundreds of kilometers. An enhanced version of LORAN (eLORAN) provides ranging from each independent station and enhanced data. The low frequency and high transmitter power in LORAN provides for a diverse PNT capability. Although LORAN has been decommissioned in the United States, other counties and regions continue and operate LORAN for an alternative to other radionavigation systems.
There are other ground‐based radiowave signal systems suitable for PVT applications. These include Multi‐lateral DME, TACAN, US Air Force Joint Tactical Information Distribution System Relative Navigation (JTIDS Relnav), US Army Position Location and Reporting System (PLRS) (see summaries in [2], pp. 6, 7 and 35–60), and cellular radiolocation services.
Cellular radiolocation services provide for enhanced 911 (E911) and location‐based services (LBSs). These PVT solutions may be based on GNSS or range and bearing determination using the actual cell towers. Two‐way ranging (e.g. round trip timing [RTT]), and bearing determination may be determined by antenna sector or advanced phase angle‐of‐arrival (AOA) determination. Several standards in the 3GPP and Userplane community govern the implementation ( http://www.3gpp.org/specificationsand https://www.omaspecworks.org/).
2.2.2 Comparison Criteria
The following criteria may be used in selecting navigation systems appropriate for a given application system:
1 Navigation method(s) used
2 System reliability/integrity
3 Navigational accuracy
4 Region(s) of coverage/availability
5 Required transmission frequencies and bands of operation
6 Navigation fix update rate
7 User set cost
8 Status of system development and readiness.
2.3 Satellite Navigation
Early satellite‐based navigation systems c. 1960–1970, such as TRANSIT, utilized a low Earth orbit (LEO) to obtain sufficient Doppler on the carrier phase for positioning. In 1973, satellite navigation in the form of the global position system (GPS) took hold with the formulation of the GPS Program Office, which helps consolidate knowledge from the TRANSIT program, the Navy's Timation Satellites, and the USAF Project 621B satellite pseudoranging program.
Today, GNSSs use medium Earth orbit (MEO) for good visibility/availably of the satellite and still provide moderate Doppler for PVT determination. Some GNSSs also supplement the GNSS constellation with geostationary (GEO), geosynchronous, or inclined geosynchronous (IGSO). These GEO and/or IGSO satellites may provide additional ranging and a data link augmentation for the GNSS constellation.
The various governing bodies for satellite navigation publish technical interface control documents and specification on their respective GNSS. For GPS, the US Government publishes various Interface Specifications and performance specifications at GPS.gov[Ref. [2] in Chapter 4]. For the Russian GLONASS, a multitude of performance and system characterizations are published by the Russian Information and Analysis Center for Positioning, Navigation and Timing. For the European Galileo GNSS, these types of documents are published by the European Global Navigation Satellite Systems Agency [Ref. [26] in Chapter 4]. For the Chinese BeiDou Navigation Satellite System, information and official documents are published (Ref. [27] in Chapter 4). Other regional type satellite navigation systems cover a specific region of Globe such as the Japanese Quazi‐Satellite System (QZSS) (Ref. [29] in Chapter 4) and the Indian Regional Navigation Satellite System (IRNSS): NAVIC (Ref. [30] in Chapter 4) provide service and/or augmentation to a specific geographical region of the Globe.
2.3.1 GNSS Orbits
Figure 2.1illustrates the key parameters that may be used to describe a GNSS satellite that orbits the Earth.
Various configurations may be used to complete a GNSS constellation. Various design parameters may be considered regarding the number of satellites, their location in the constellation, location on ground infrastructure components, and user segment service area.
GPS satellites occupy six orbital planes in an MEO that are inclined 55° from the equatorial plane, as illustrated in Figure 2.2. Each of the six orbit planes in Figure 2.2contains four or more satellites. The European Galileo and Chinese BeiDou use three orbital planes separated in longitude by 120°. Galileo has plans for 10 MEO satellites in each orbital plane. Glonass also used three orbital planes while maintaining a nominal 24 satellite constellation. GNSS augmentation or regional satellite‐based navigation systems are most often placed in GEO or IGSO over the region to be services; these satellites will have an orbital period of 24 hours.
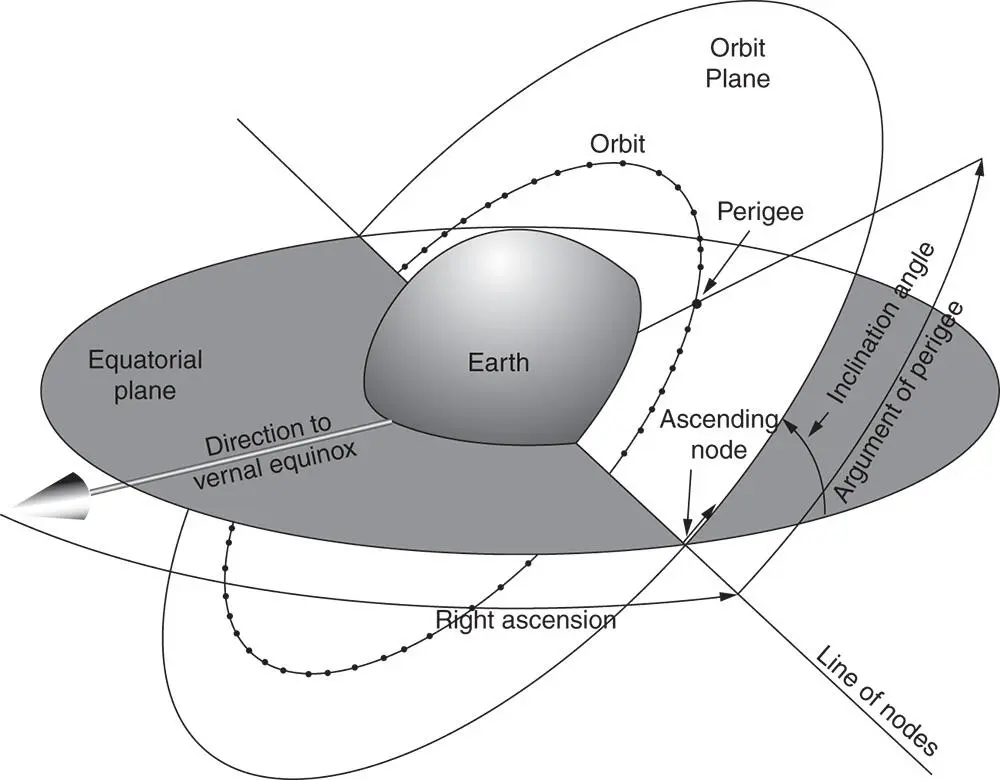
Figure 2.1Parameters defining satellite orbit geometry.
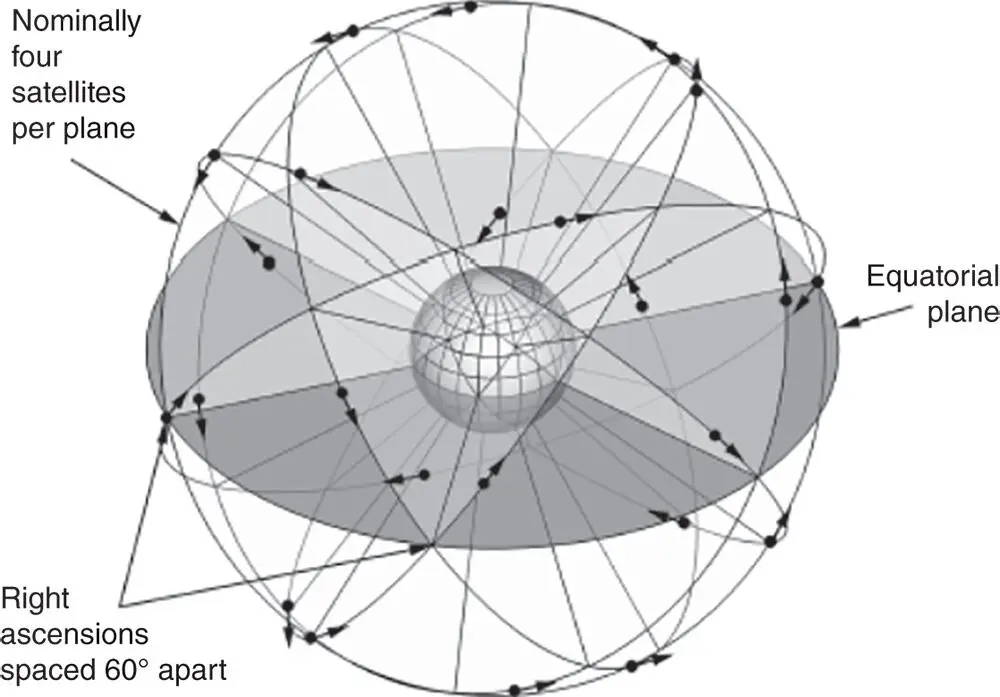
Figure 2.2Six GPS orbit planes inclined 55° from the equatorial plane.
Regardless of the type of radionavigation (satellite‐based or terrestrial‐based) system, most often the solution method requires the determination of a unknown user antenna location with known transmitter locations and measured range (or pseudorange) observations.
2.3.2 Navigation Solution (Two‐Dimensional Example)
Antenna location in two dimensions can be calculated by using range measurements [3].
2.3.2.1 Symmetric Solution Using Two Transmitters on Land
Интервал:
Закладка:
Похожие книги на «Global Navigation Satellite Systems, Inertial Navigation, and Integration»
Представляем Вашему вниманию похожие книги на «Global Navigation Satellite Systems, Inertial Navigation, and Integration» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.












Обсуждение, отзывы о книге «Global Navigation Satellite Systems, Inertial Navigation, and Integration» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.