Barna Szabó - Finite Element Analysis
Здесь есть возможность читать онлайн «Barna Szabó - Finite Element Analysis» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Finite Element Analysis
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Finite Element Analysis: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Finite Element Analysis»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Finite Element Analysis — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Finite Element Analysis», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
The choice of basis functions is guided by considerations of implementation, keeping the condition number of the coefficient matrices small, and personal preferences. For the symmetric positive‐definite matrices considered here the condition number C is the largest eigenvalue divided by the smallest. The number of digits lost in solving a linear problem is roughly equal to  . Characterizing the condition number as being large or small should be understood in this context. In the finite element method the condition number depends on the choice of the basis functions and the mesh.
. Characterizing the condition number as being large or small should be understood in this context. In the finite element method the condition number depends on the choice of the basis functions and the mesh.
The standard polynomial basis functions, called shape functions, can be defined in various ways. We will consider shape functions based on Lagrange polynomials and Legendre 12 polynomials. We will use the same notation for both types of shape function.
Lagrange shape functions
Lagrange shape functions of degree p are constructed by partitioning  into p sub‐intervals. The length of the sub‐intervals is typically
into p sub‐intervals. The length of the sub‐intervals is typically  but the lengths may vary. The node points are
but the lengths may vary. The node points are  ,
,  and
and  . The i th shape function is unity in the i th node point and is zero in the other node points:
. The i th shape function is unity in the i th node point and is zero in the other node points:
(1.50) 
These shape functions have the following important properties:
(1.51) 
For example, for  the equally spaced node points are
the equally spaced node points are  ,
,  ,
,  . The corresponding Lagrange shape functions are illustrated in Fig. 1.3.
. The corresponding Lagrange shape functions are illustrated in Fig. 1.3.
Exercise 1.5Sketch the Lagrange shape functions for  .
.
Legendre shape functions
For  we have
we have
(1.52) 
For  we define the shape functions as follows:
we define the shape functions as follows:
(1.53) 
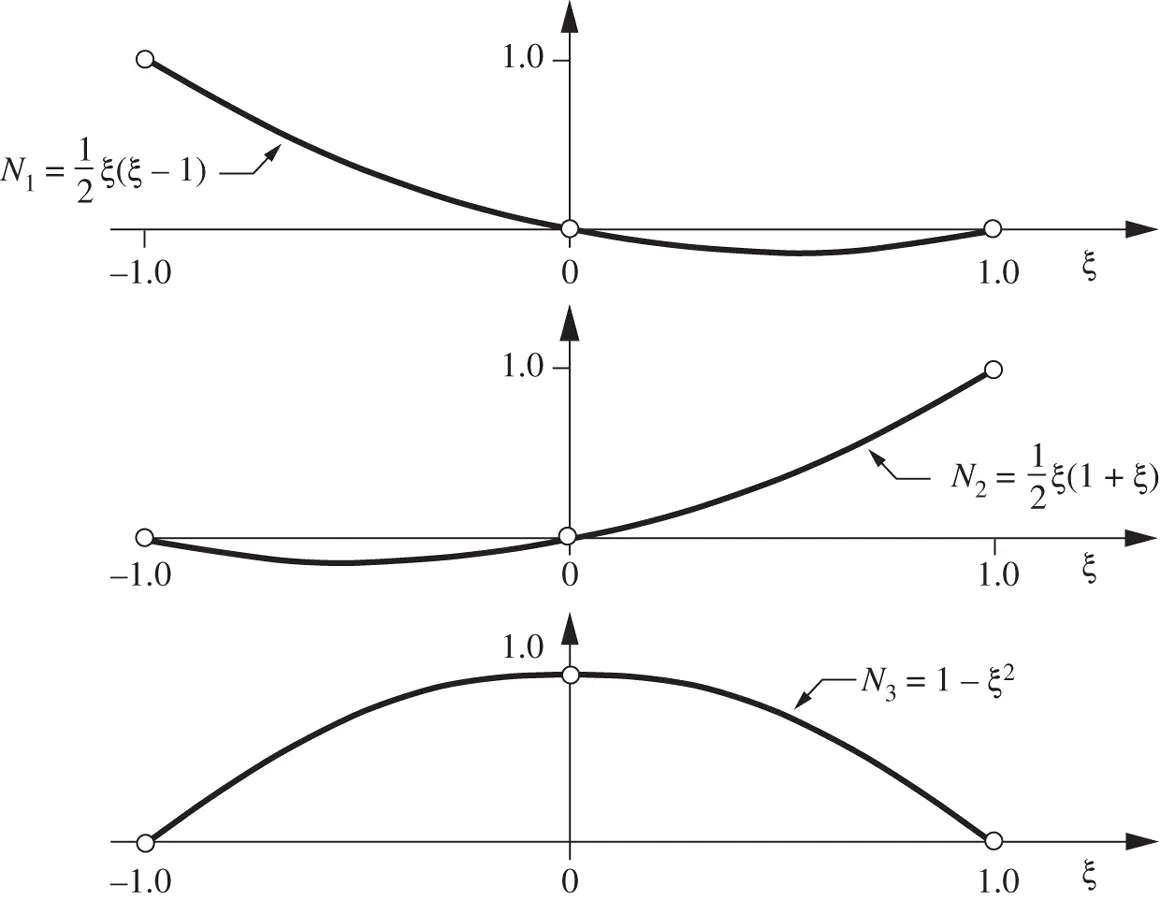
Figure 1.3 Lagrange shape functions in one dimension,  .
.
where  are the Legendre polynomials. The definition of Legendre polynomials is given in Appendix D. These shape functions have the following important properties:
are the Legendre polynomials. The definition of Legendre polynomials is given in Appendix D. These shape functions have the following important properties:
1 Orthogonality. For :(1.54) This property follows directly from the orthogonality of Legendre polynomials, see eq. (D.13) in the appendix.
2 The set of shape functions of degree p is a subset of the set of shape functions of degree . Shape functions that have this property are called hierarchic shape functions.
3 These shape functions vanish at the endpoints of : for .
The first five hierarchic shape functions are shown in Fig. 1.4. Observe that all roots lie in  . Additional shape functions, up to
. Additional shape functions, up to  , can be found in the appendix, Section D.1.
, can be found in the appendix, Section D.1.
Exercise 1.6Show that for the hierarchic shape functions, defined by eq. (1.53),  for
for  .
.
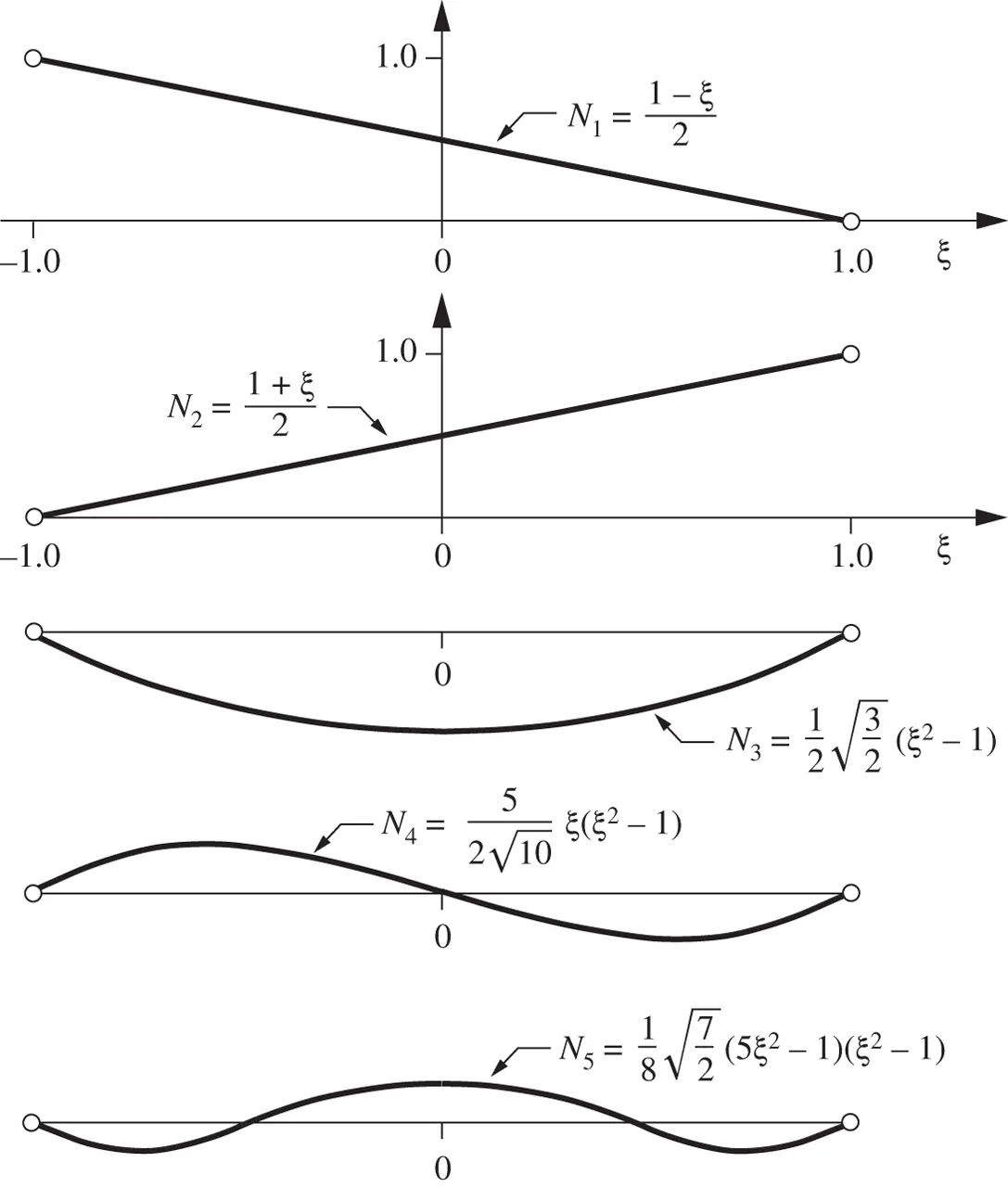
Figure 1.4 Legendre shape functions in one dimension,  .
.
Exercise 1.7Show that the hierarchic shape functions defined by eq. (1.53)can be written in the form:
(1.55) 
Hint: note that  for all n and use equations (D.10) and (D.12) in Appendix D.
for all n and use equations (D.10) and (D.12) in Appendix D.
1.3.2 Finite element spaces in one dimension
We are now in a position to provide a precise definition of finite element spaces in one dimension.
The domain  is partitioned into M non‐overlapping intervals called finite elements. A partition, called finite element mesh, is denoted by
is partitioned into M non‐overlapping intervals called finite elements. A partition, called finite element mesh, is denoted by  . Thus
. Thus  . The boundary points of the elements are the node points. The coordinates of the node points, sorted in ascending order, are denoted by xi , (
. The boundary points of the elements are the node points. The coordinates of the node points, sorted in ascending order, are denoted by xi , (  ) where
) where  and
and  . The k th element Ik has the boundary points xk and
. The k th element Ik has the boundary points xk and  , that is,
, that is,  .
.
Интервал:
Закладка:
Похожие книги на «Finite Element Analysis»
Представляем Вашему вниманию похожие книги на «Finite Element Analysis» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.








Обсуждение, отзывы о книге «Finite Element Analysis» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.