Alexander Martínez - Automática y Robótica en Latinoamérica
Здесь есть возможность читать онлайн «Alexander Martínez - Automática y Robótica en Latinoamérica» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на испанском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Automática y Robótica en Latinoamérica
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Automática y Robótica en Latinoamérica: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Automática y Robótica en Latinoamérica»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Automática y Robótica en Latinoamérica — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Automática y Robótica en Latinoamérica», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Problem and proposed methodological solution
In Figure 1 is described a general system, such as the mechanical movement source, which is the motor (depicted by M1); the machine that receives the movement could be a compressor, turbine, pump, etc. (depicted by M3). Both situations joined by a rotor (depicted by M2), for which represents the axis connection that cross 3 blocks. Furthermore, this figure represents Dynamic Forces Analysis over the rotor. Therefore, its mechanical physical movement can be described by Second Newton Law.
Figure 1
General rotor (shaft) scheme under the equilibrium of forces
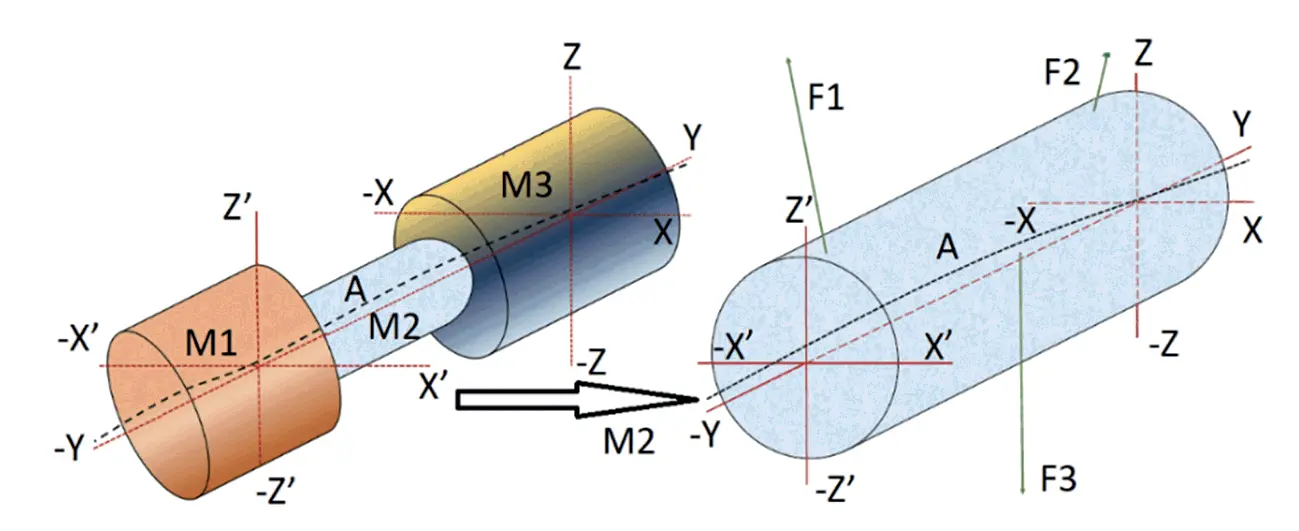
Source: Own elaboration.
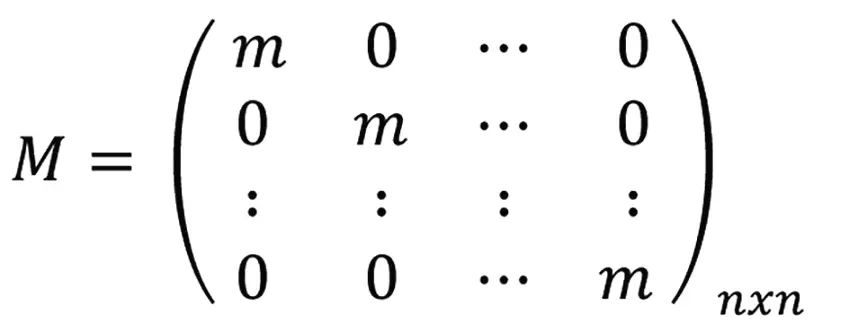
It means the equation 1, in which M2 is mass of the rotor, Fg is its gravity force, FR represents Reactions Forces and Fc is the inertial effect, because of circumferential movement around axis [5], that generalizes information of forces around the system that is composed complexly way joining M1, M2, M3 and summarizes dynamic analysis over the shaft.
 (1)
(1)
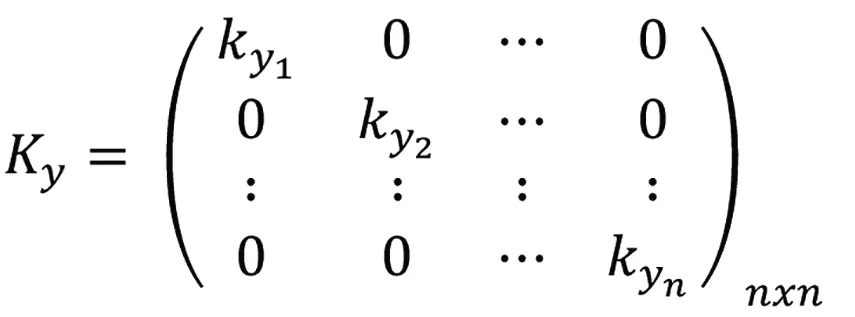
For which, it is necessary to remember the y, which is the selected coordinate to study the movement of the rotor. Also, every equation is in matrix analysis that means every solution in order to find parameters and coefficients that are in matrix solution too, as it is described in equations 2 and 3. The matrix that is composed for every stiffness coefficient is shown through equation three.
 (2)
(2)
 (3)
(3)
By the other hand also, it is depicted the energy transmission in Figure 2, for which by the conservation of energy can be described mechanical movement transmission as in equation 1, as it was described above. Therefore, in Figure 2 are represented the same blocks that do not need specific analysis of force to describe movement transmission. It means to correlate specific coefficients, such as the friction (as the function of heat) is explained better through the energy model, as it is given in equations 4 and 5. Notwithstanding, it is possible to verify the energetic model that can be achieved through a dynamic model, because of Lagrange.
Figure 2
General rotor (shaft) scheme under the energy transmission
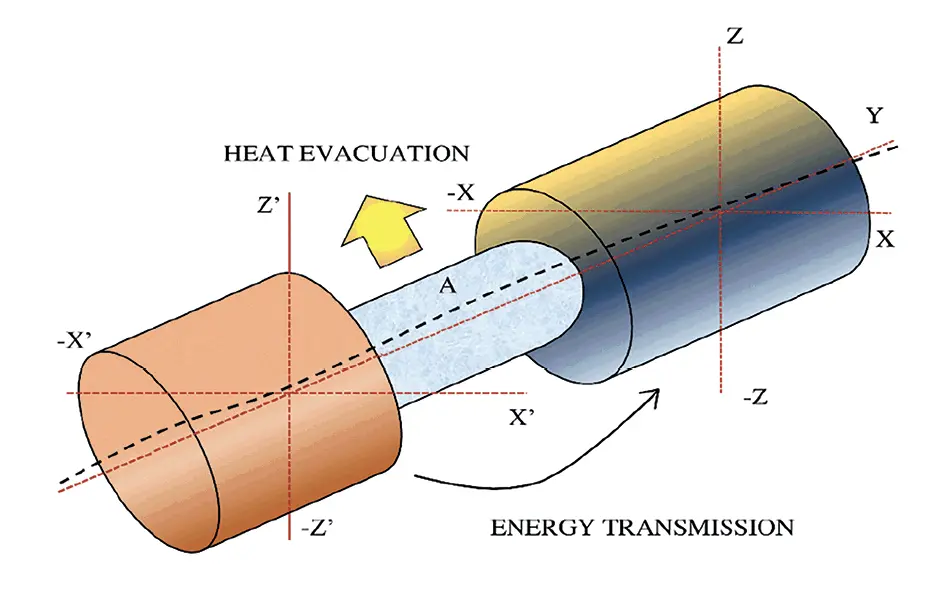
Source: Own elaboration.
As a consequence, equation 4 describes energy balance over the shaft, for that V is its speed, and Zf is the imbalance coefficient, due to energy transmission has losses.
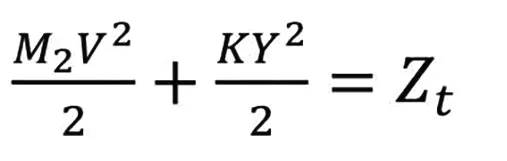 (4)
(4)
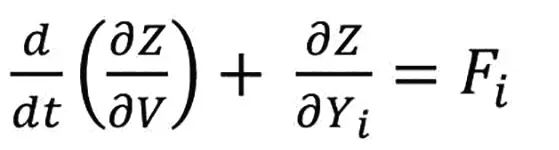 (5)
(5)
Otherwise, by Lagrange is obtained equation 5, in which Fi is the coefficient that helps to get losses approximation from the shaft. However, both equations that were described above are given for a component of its matrix form. Therefore, in this work it is proposed a high modulation from sensors to actuators, it means in Figure 3 is represented the effect to improve a mechanic system by nanostructures. It means in Figure 3a is depicted a simple energy transmission among the mechanical systems, for which also must to be given lost energy, such as by the heat. How to avoid this? It could be reduced through many mechanisms of evacuating energy. However, it makes systems to be expensive without total reduction of the heat, because of the natural thermodynamic behavior of systems.
Figure 3
General rotor (shaft) scheme under the energy transmission and control
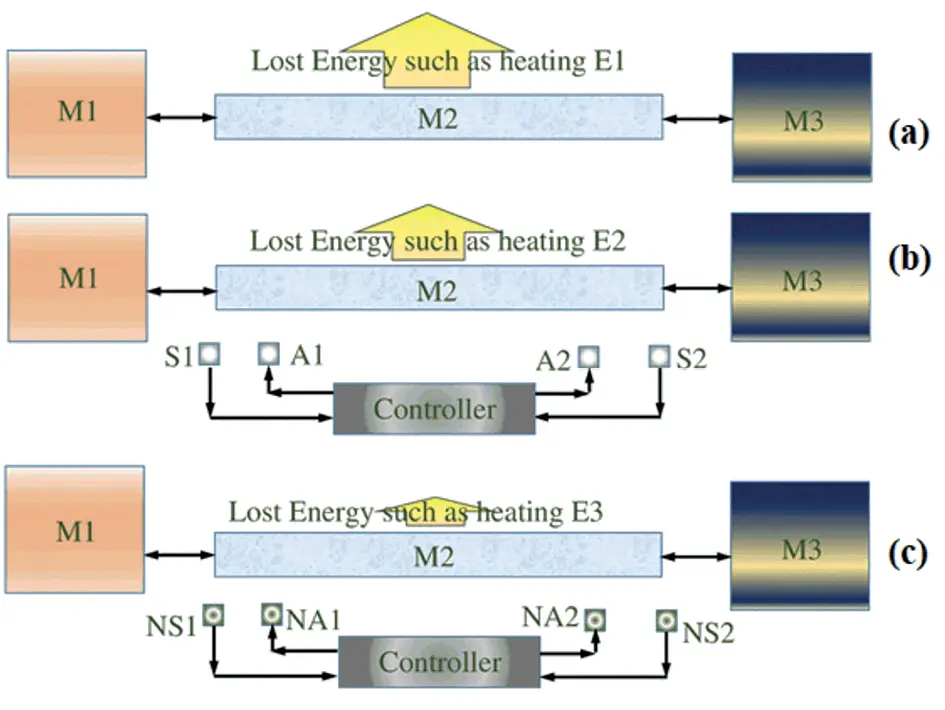
Source: Own elaboration.
Notwithstanding, while it is controlled by intelligent algorithms through sensors and actuators, the energy transmission enhances, but that transmission gets costing of the produced heat even AMB used over the rotor. It is because the energy transmitted through wires that produce electromagnetic field. Therefore, by faster sensors/actuators as it was proposed from sensors that were based in nanostructures (as in this research), the heat is reduced and movement transmission between rotating machines can get better efficiency. For this reason, it was necessary to quantify the heat that was produced over wires by Joule effect and the evacuated heat as the dependence of geometrical parameters and temperatures, as it was depicted in following equations. For this, Q is the heat evacuation due to friction, T is the temperature, K is the conductivity coefficient, A is cross sectional area to the heat flow, U is the excitation signal and Kp is the proportional gain of the thermal model.
 (6)
(6)
 (7)
(7)
For which, the proposal solution is given by equation 7. It means that for steady state:
 (8)
(8)
 (9)
(9)
And from which temperatures matrix:
 (10)
(10)
By other side, it can be improved by control systems. Nevertheless, this is not totally good, due to in sophisticated systems that need fast and robust response, the controller (even so sophisticated) could be that it cannot reduce in total the heat transmission (it is depicted by Figure 3b). Therefore, what to do? It could be enhanced through faster sensors and actuators, as it is depicted in Figure 3c, it because sensors/actuators that were based in nanostructures.
The physical parameters identification and error analysis to get position control are given by a general system identification, as it is shown in equation 11, for a general expression of the rotor dynamic, in which I is the matrix of electrical current values for every component i. Furthermore, the stiffness coefficient Ky and electrical coefficient KIL.
 (11)
(11)
Интервал:
Закладка:
Похожие книги на «Automática y Robótica en Latinoamérica»
Представляем Вашему вниманию похожие книги на «Automática y Robótica en Latinoamérica» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Automática y Robótica en Latinoamérica» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.