Computational Statistics in Data Science
Здесь есть возможность читать онлайн «Computational Statistics in Data Science» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Computational Statistics in Data Science
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Computational Statistics in Data Science: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Computational Statistics in Data Science»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Computational Statistics in Data Science
Computational Statistics in Data Science
Wiley StatsRef: Statistics Reference Online
Computational Statistics in Data Science
Computational Statistics in Data Science — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Computational Statistics in Data Science», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
5.2 Objective Function
Autoencoder is first introduced in Rumelhart et al . [16] as a model with the main goal of learning a compressed representation of the input in an unsupervised way. We are essentially creating a network that attempts to reconstruct inputs by learning the identity function. To do so, an autoencoder can be divided into two parts,  (encoder) and
(encoder) and  (decoder), that minimize the following loss function w.r.t. the input
(decoder), that minimize the following loss function w.r.t. the input  :
:

The encoder (  ) and decoder (
) and decoder (  ) can be any mappings with the required input and output dimensions, but for image analysis, they are usually CNNs. The norm of the distance can be different, and regularization can be incorporated. Therefore, a more general form of the loss function is
) can be any mappings with the required input and output dimensions, but for image analysis, they are usually CNNs. The norm of the distance can be different, and regularization can be incorporated. Therefore, a more general form of the loss function is
(3) 
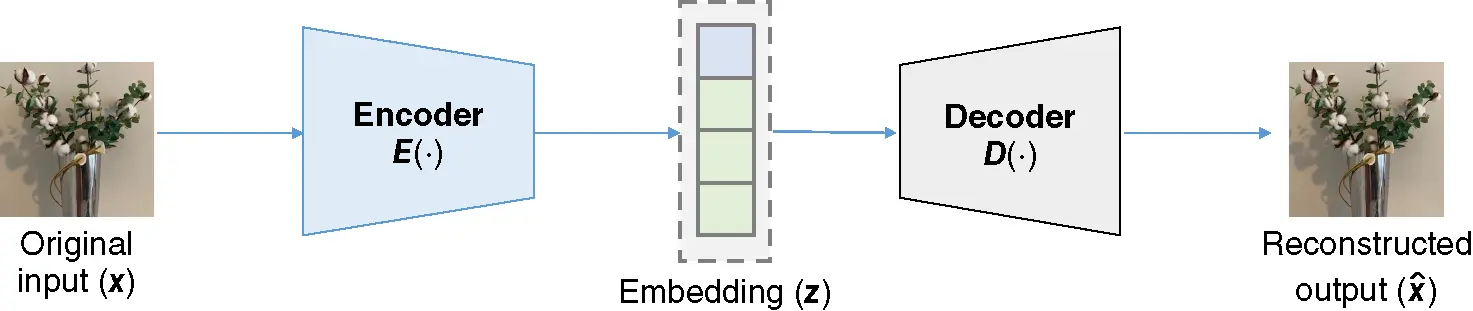
Figure 5 Architecture of an autoencoder.
Source : Krizhevsky [14]
where  is the output of an autoencoder, and
is the output of an autoencoder, and  represents the loss function that captures the distance between an input and its corresponding output.
represents the loss function that captures the distance between an input and its corresponding output.
The output of the encoder part is known as the embedding, which is the compressed representation of input learned by an autoencoder. Autoencoders are useful for dimension reduction, since the dimension of an embedding vector can be set to be much smaller than the dimension of input. The embedding space is called the latent space, the space where the autoencoder manipulates the distances of data. An advantage of the autoencoder is that it can perform unsupervised learning tasks that do not require any label from the input. Therefore, autoencoder is sometimes used in pretraining stage to get a good initial point for downstream tasks.
5.3 Variational Autoencoder
Many different variants of the autoencoder have been developed in the past years, but the variational autoencoder (VAE) is the one that achieved a major improvement in this field. VAE is one of the frameworks, which attempts to describe an observation in latent space in a probabilistic manner. Instead of using a single value to describe each dimension of the latent space, the encoder part of VAE uses a probability distribution to describe each latent dimension [17].
Figure 6shows the structure of the VAE. The assumption is that each input data  is generated by some random process conditioned on an unobserved random latent variable
is generated by some random process conditioned on an unobserved random latent variable  . The random process consists of two steps, where
. The random process consists of two steps, where  is first generated from some prior distribution
is first generated from some prior distribution  , and then
, and then  is generated from a conditional distribution
is generated from a conditional distribution  . The probabilistic decoder part of VAE performs the random generation process. We are interested in the posterior over the latent variable
. The probabilistic decoder part of VAE performs the random generation process. We are interested in the posterior over the latent variable  , but it is intractable since the marginal likelihood
, but it is intractable since the marginal likelihood  is intractable. To approximate the true posterior, the posterior distribution over the latent variable
is intractable. To approximate the true posterior, the posterior distribution over the latent variable  is assumed to be a distribution
is assumed to be a distribution  parameterized by
parameterized by  .
.
Given an observed dataset  , the marginal log‐likelihood is composed of a sum over the marginal log‐likelihoods of all individual data points:
, the marginal log‐likelihood is composed of a sum over the marginal log‐likelihoods of all individual data points:  , where each marginal log‐likelihood can be written as
, where each marginal log‐likelihood can be written as
(4) 
where the first term is the KL divergence [18] between the approximate and the true posterior, and the second term is called the variational lower bound. Since KL divergence is nonnegative, the variational lower bound is defined as
(5) 
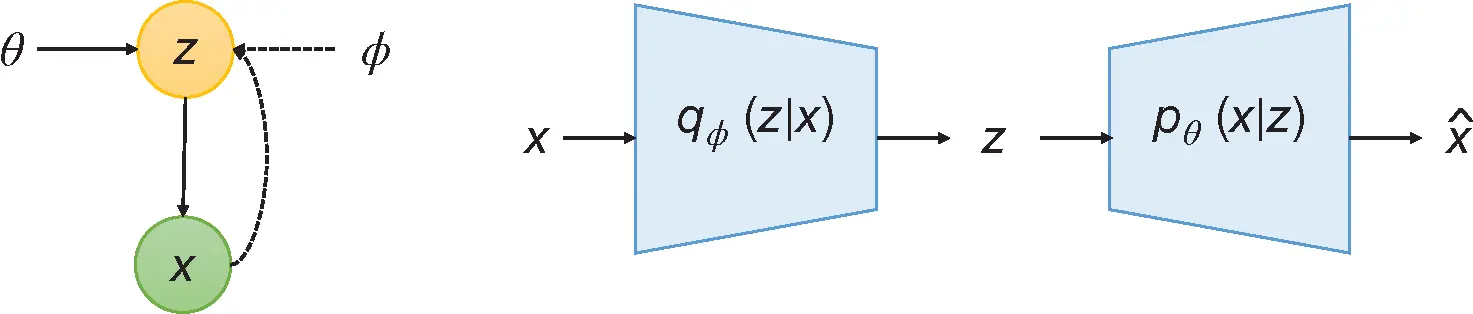
Figure 6 Architecture of variational autoencoder (VAE).
Therefore, the loss function of training a VAE can be simplified as
(6) 
where the first term captures the reconstruction loss, and the second term is regularization on the embedding. To optimize the loss function ( 6), a reparameterization trick is used. For a chosen approximate posterior  , the latent variable
, the latent variable  is approximated by
is approximated by
Интервал:
Закладка:
Похожие книги на «Computational Statistics in Data Science»
Представляем Вашему вниманию похожие книги на «Computational Statistics in Data Science» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.
![Роман Зыков - Роман с Data Science. Как монетизировать большие данные [litres]](/books/438007/roman-zykov-roman-s-data-science-kak-monetizirova-thumb.webp)











Обсуждение, отзывы о книге «Computational Statistics in Data Science» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.