Héctor Jorquera González - Métodos numéricos aplicados a Ingeniería
Здесь есть возможность читать онлайн «Héctor Jorquera González - Métodos numéricos aplicados a Ingeniería» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Métodos numéricos aplicados a Ingeniería
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Métodos numéricos aplicados a Ingeniería: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Métodos numéricos aplicados a Ingeniería»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Métodos numéricos aplicados a Ingeniería — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Métodos numéricos aplicados a Ingeniería», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
a) Podemos remplazar J (k)por una matriz Aconstante, con lo que se obtiene el método de la cuerda paralela:

b) Si escogemos A = I, tenemos una iteración de punto fijo en cada variable por separado, con pérdida de rapidez de convergencia. Una elección más apropiada es A = J (0), con lo cual la iteración queda:

Esta se utiliza frecuentemente en resolución de ecuaciones diferenciales ordinarias por métodos implícitos (capítulo 3). Generalmente, el jacobiano Jse revalúa cada m iteraciones, para mejorar la rapidez de convergencia.
c) Cuando las derivadas parciales no se entregan explícitamente, el jacobiano se puede determinar por diferencias finitas. Esto conduce al método de Newton discreto:

Comentarios:
De las aproximaciones recién comentadas se desprenden dos desventajas:
i) Hay que evaluar el jacobiano (a veces por diferencias finitas). Esto implica n 2operaciones por paso (se puede reducir si se actualiza el jacobiano cada m iteraciones).
ii) La solución para d (k)implica n 3/3 operaciones por iteración, aunque si el jacobiano se fija, esto significa n 2operaciones/iteración.
En general, las funciones fson caras de evaluar en problemas de ingeniería de procesos, por lo que los métodos de Newton son costosos en términos de tiempo computacional. Para disminuir el número de operaciones/iteración, se recurre a los métodos de cuasi-Newton, que usan una aproximación al jacobiano, los que son actualizados en cada paso a fin de reducir el número de operaciones. Para más detalles acerca de estos métodos, se recomienda consultar el artículo de Sargent [2] y el de Dennis y Mori [3].
El siguiente ejemplo muestra un código Matlab ®para resolver un sistema de n ecuaciones usando el método de Newton discreto 2.18. Se calcula cada columna ‘j’ del jacobiano introduciendo una perturbación a la variable ‘j’ mediante diferencias finitas.
Ejemplo 2.6. Aplicación del método de Newton discreto en N variables
Se desea resolver el sistema de ecuaciones no lineales:

Se usa el método de Newton discreto. El método programado debe controlar que el número de iteraciones no exceda un valor máximo, y como criterio de error utilizar la norma del vector f: err = || f( x (k))||= norm ( f) que debe ser menor a 1·10 -5. ¿Cuántas raíces distintas encuentra usted?
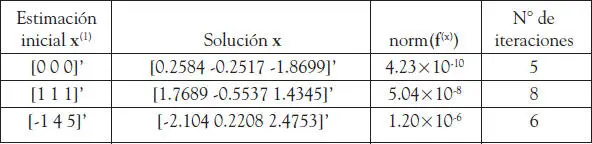
La siguiente tabla muestra los resultados de aplicar el método de Newton discreto al sistema de ecuaciones anterior, con distintos vectores iniciales x (1). En este caso encontramos tres raíces diferentes. Esto se debe a que si eliminamos x 2y x 3en las ecuaciones del sistema, hallamos una ecuación cúbica para x 1, la cual posee tres raíces reales distintas. La función que implementa el método de Newton y el sistema de ecuaciones se entregan a continuación de la tabla; hay que hacer notar que el vector f(x)debe ser un vector columna.
TABLA 2.3. Solución del ejemplo 2.6
A continuación el listado del macro de Matlab ®que resuelve el ejemplo 2.6.
function [raiz,f,err,nit]=newton_dis_N(fun,x1,tol,maxit)
% Esta rutina resuelve un sistema de ecuaciones no lineales usando el método clásico de
% Newton-Raphson con jacobiano discreto. Variables de entrada:
% fun: función externa que calcula el vector f(x)
% x0: vector inicial estimado para la solución
% tol: tolerancia en error relativo de x
% maxit: máximo número de iteraciones aceptable
% variables de salida:
% raíz: vector solución estimada
% f: valor de la función en la solución estimada
% err: estimación del error alcanzado
% nit: número de iteraciones realizadas por el método
if nargin<4,
maxit=100;
end
if nargin<3,
tol=1e-5;
end
if nargin<2,
error(‘no se puede calcular nada’);
end
%% inicialización del cálculo
xr=x1; iter=0;
ep=1e-4; % incremento para calcular diferencias finitas en el jacobiano
N=length(x1); I=eye(N); J=zeros(N,N);
%% ciclo principal del cálculo
while (1)
xrold=xr;
f=fun(xrold);
for j=1:N,
J(:,j)=(fun(xrold+ep*I(:,j))-f)/ep;
end
xr=xrold-J\f;
ef=norm(f); % error en la norma de f(x)
iter=iter+1; % incremento del número de iteraciones
if efmaxit,
break;
end
end
%% asignación de variables de salida
raiz=xr; err=ef; nit=iter;
function y = f1(x)
%sistema de ecuaciones no lineales del ejemplo 2.5
y(1) = x(1)^2+x(2)^2-x(3)-2;
y(2) = x(1)+5*x(2)+1;
y(3) = x(1)*x(3)-2*x(1)+1;
y = y(:);
2.4.2. Rutinas implementadas en Matlab ®para sistemas de ecuaciones
En el caso de sistemas de ecuaciones lineales, Matlab ®tiene como herramienta básica de resolución la rutina fsolve . Esta rutina recibe como argumentos mínimos una función de Matlab ®donde se expresa el sistema de ecuaciones como función del vector x, que es el segundo argumento mínimo requerido por fsolve . La función puede aplicar tres algoritmos diferentes: Gauss-Newton, Levenberg-Marquardt y Región de Confianza, y por defecto calcula el jacobiano del sistema de ecuaciones por diferencias finitas.
Si esta función tiene dificultades para hallar la solución, sobre todo cuando la dimensión de xaumenta, entonces se puede intentar minimizar la función escalar f(x)· f(x), que es mínima cuando f(x) = 0. Así se puede probar con fminunc que minimiza una función escalar de un vector xsin restricciones, o bien probar fmincon que opera con restricciones y por tanto reduce el espacio de búsqueda de la solución.
2.5 Problemas propuestos
2.5.1 Método del punto fijo para ecuaciones escalares
1) Considere la resolución de la ecuación cúbica:

Se propone encontrar una raíz positiva (>1) de la ecuación anterior, utilizando las siguientes funciones de actualización:
a) Despejando la raíz cúbica, llámela φ 1(x) = (x 2+2) 1/3
b) Despejando la raíz cuadrada, llámela φ 2(x) = (x 3-2) 1/2
Realice iteraciones del punto fijo usando las dos funciones de actualización ya descritas. Indique si las iteraciones están convergiendo o no, y por qué se produce tal comportamiento.
2) Para el flujo turbulento en una cañería lisa, el factor de fricción c viene dado por la solución de la ecuación algebraica:
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Métodos numéricos aplicados a Ingeniería»
Представляем Вашему вниманию похожие книги на «Métodos numéricos aplicados a Ingeniería» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.






Обсуждение, отзывы о книге «Métodos numéricos aplicados a Ingeniería» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.