Ronald J. Anderson - The Practice of Engineering Dynamics
Здесь есть возможность читать онлайн «Ronald J. Anderson - The Practice of Engineering Dynamics» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:The Practice of Engineering Dynamics
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
The Practice of Engineering Dynamics: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «The Practice of Engineering Dynamics»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
The Practice of Engineering Dynamics — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «The Practice of Engineering Dynamics», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
(1.23) 
By definition, the absolute velocity of  is the time rate of change of its position with respect to a fixed point. That is,
is the time rate of change of its position with respect to a fixed point. That is,
(1.24) 
which, upon substitution of Equation 1.23, becomes,
(1.25) 
which in turn becomes,
(1.26) 
where we see that the absolute velocity of  can be expressed as the sum of the velocities of points in the vector chain relative to previous points in the chain so long as the first point is stationary.
can be expressed as the sum of the velocities of points in the vector chain relative to previous points in the chain so long as the first point is stationary.
Simply differentiating Equation 1.26with respect to time gives the corresponding expression for accelerations.
(1.27) 
With respect to the particular system being considered here, we can write,
(1.28) 
and,
(1.29) 
Considering first the position of  with respect to
with respect to  we see that the length
we see that the length  is constant so there will be no rate of change of magnitude of the vector but there will be a rate of change of direction since the coordinate system is rotating. We find,
is constant so there will be no rate of change of magnitude of the vector but there will be a rate of change of direction since the coordinate system is rotating. We find,
(1.30) 
We differentiate again, noting that  is not constant so that there will be a rate of change of magnitude this time, and find,
is not constant so that there will be a rate of change of magnitude this time, and find,
(1.31) 
The rate of change of  is a little more complicated for two reasons. First, the vector is not in the body to which the coordinate system being used is fixed so there will be a rate of change of magnitude arising from the time derivatives of the trigonometric functions. Second, the vector itself is not of fixed length so terms involving the rate of change of
is a little more complicated for two reasons. First, the vector is not in the body to which the coordinate system being used is fixed so there will be a rate of change of magnitude arising from the time derivatives of the trigonometric functions. Second, the vector itself is not of fixed length so terms involving the rate of change of  will appear. Differentiating yields,
will appear. Differentiating yields,
(1.32) 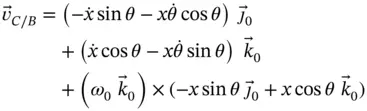
which, noting that  (see Figure 1.5), expands to,
(see Figure 1.5), expands to,
(1.33) 
Finally, we differentiate  to get
to get  as follows.
as follows.
(1.34) 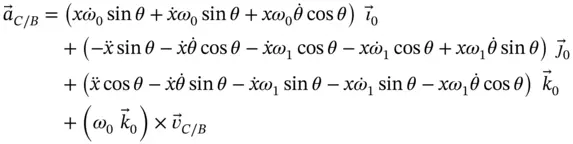
which, after considerable effort and again noting that  , expands to,
, expands to,
(1.35) 
If you have worked through the derivation of Equation 1.35you will be aware that the probability of making a mistake when deriving equations such as this is high. A quick, approximate check on the accuracy of your work can be made by verifying that every term in the acceleration expression has dimensions of acceleration or, more simply, contains two derivatives of displacement variables. That is, terms like  are obviously accelerations whereas terms like
are obviously accelerations whereas terms like  might require a little thought before realizing that
might require a little thought before realizing that  is the second derivative of an angle and must be scaled by a length, in this case
is the second derivative of an angle and must be scaled by a length, in this case  , in order to be a translational acceleration. Products of angular velocities such as
, in order to be a translational acceleration. Products of angular velocities such as  and
and  have two derivatives of angles multiplied together and are again scaled by a length,
have two derivatives of angles multiplied together and are again scaled by a length,  , to become translational accelerations. In addition, it is somewhat comforting to see several terms that have the Coriolis factor of 2 associated with them. Suspicion should be raised when factors other than 1 or 2 are seen in acceleration expressions.
, to become translational accelerations. In addition, it is somewhat comforting to see several terms that have the Coriolis factor of 2 associated with them. Suspicion should be raised when factors other than 1 or 2 are seen in acceleration expressions.
Интервал:
Закладка:
Похожие книги на «The Practice of Engineering Dynamics»
Представляем Вашему вниманию похожие книги на «The Practice of Engineering Dynamics» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.

Обсуждение, отзывы о книге «The Practice of Engineering Dynamics» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.