Stefan Schmerler - Softwaretest in der Praxis
Здесь есть возможность читать онлайн «Stefan Schmerler - Softwaretest in der Praxis» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на немецком языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Softwaretest in der Praxis
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Softwaretest in der Praxis: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Softwaretest in der Praxis»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Konkret adressiert das Buch folgende Fragestellungen: Welche Testtechnologie soll eingesetzt werden für mein spezifisches Problem?
Wie lange und mit welchem Aufwand sollte ich testen, um guten Gewissens (was auch immer das beim Testen heißen mag) die Testphase abbrechen zu können? Wie hoch ist das dann noch verbleibende Risiko, wie fehleranfällig ist mein System dann noch? Gibt es eine Metrik für Reifegrad und Qualität von Software, die einfach und schnell anzuwenden ist?
Für die häufigsten Testprobleme werden Schritt-für-Schritt-Anleitungen hinsichtlich Testfallermittlung vorgeschlagen, um mit minimalem Aufwand die größtmögliche Absicherungstiefe zu erzielen. Der Leitfaden kann unmittelbar eingesetzt werden in fast jedem Softwareentwicklungsprojekt. Neben dem klassischen Softwaretest (dynamische und statische Testverfahren, Test von Echtzeitsystemen, modellbasierter Test u.a.), werden wichtige Aspekte der Absicherung eingebetteter Software am Beispiel der Automobilelektronik detailliert erläutert, z. B. Hardware-, Software-, Model- und Vehicle-in-the-Loop-Technologie, virtuelle Integration bis hin zum Test von Fahrerassistenzsystemen und der Software für Autonomes Fahren.
Softwaretest in der Praxis — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Softwaretest in der Praxis», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
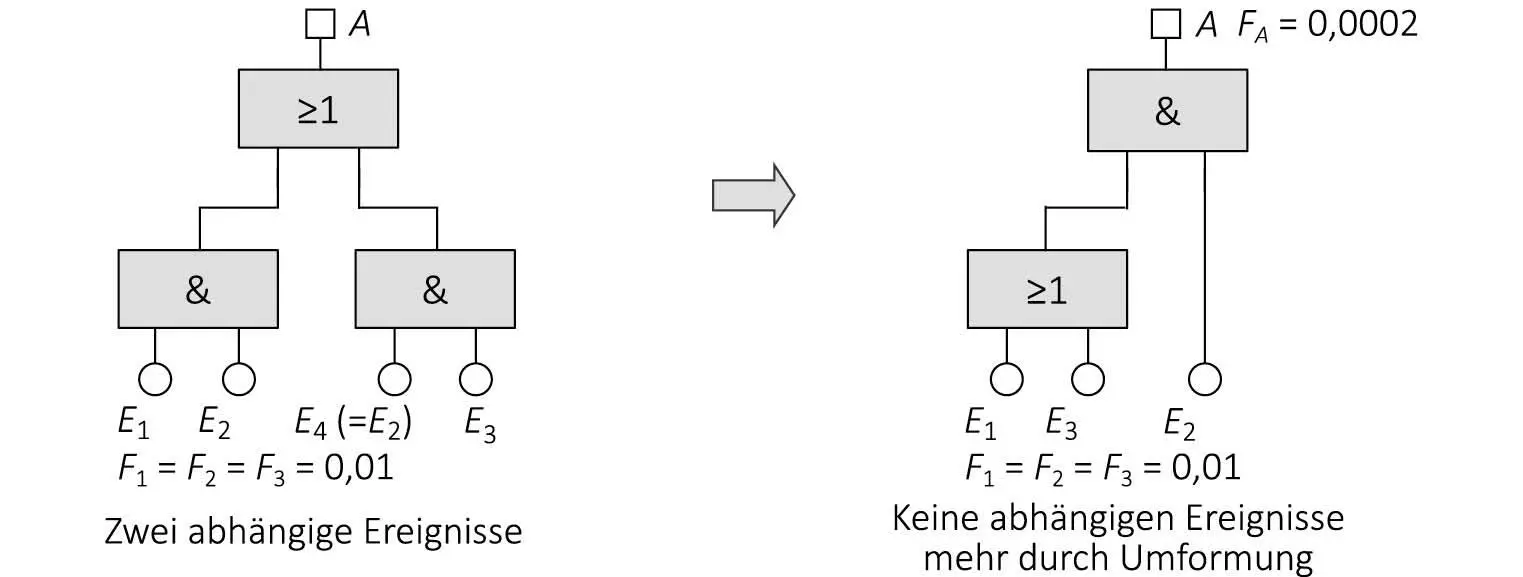
Abb. 2-2: Boolesche Umformungen sind hilfreich.
2.2.3 Markov-Modellierung
Das Systemverhalten wird als sto-
chastischer Prozess verstanden.
Eine weitere gängige Methode der Zuverlässigkeitsmodellierung ist die Markov-Modellierung. Sie beschreibt das Systemverhalten mit Zustandsautomaten als stochastischen Prozess. Ziel ist es, die Wahrscheinlichkeit für das Eintreten zukünftiger Ereignisse anzugeben. Fasst man das Auftreten eines Fehlers als Ereignis auf, dessen Wahrscheinlichkeit für die Beurteilung des Reifegrads von Bedeutung ist, kann eine Analyse von Markov-Modellen wertvolle Aussagen liefern. Insbesondere ist die Frage interessant, mit welcher Wahrscheinlichkeit unser System denn nun defekt ist, wenn man es zu einem zufälligen Zeitpunkt betrachtet.
zufällige Zustandsübergänge
Bei einer Markov-Kette besteht die Möglichkeit, die Kanten eines Zustandsautomaten mit Wahrscheinlichkeiten zu versehen und somit zufällige Zustandsänderungen im Modell zu hinterlegen.

Dies gestattet die Beschreibung eines zufälligen Ausfallverhaltens mittels der statistischen Ausfallrate λ und der Reparaturrate μ. Im Beispiel ist der intakte Systemzustand mit A bezeichnet, der Systemausfallzustand mit B.
Ausfallrate λ
Die Ausfallrate λ ist zu verstehen als Grenzwert der in einem Zeitintervall Δt ausgefallenen Einheiten bezogen auf die zu Beginn noch funktionsfähigen Einheiten R(t) für Δt → 0.
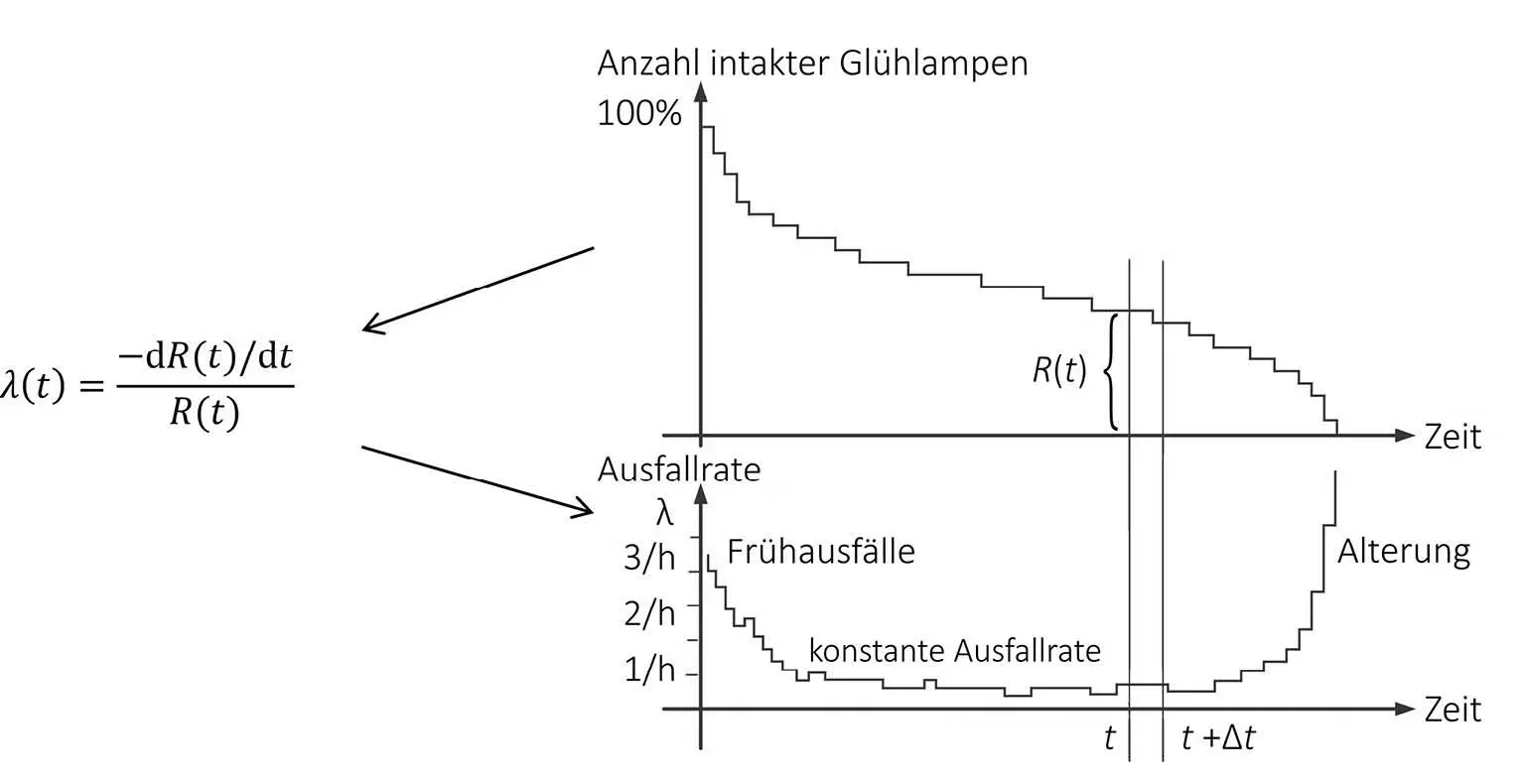
Abb. 2-3: Illustration der Ausfallrate am Beispiel von Glühbirnen
Es handelt sich um die bedingte Wahrscheinlichkeit, dass ein System, das bis zum Zeitpunkt t ausfallfrei war, auch noch das Zeitintervall Δt ohne Ausfall übersteht.
Reparaturrate μ
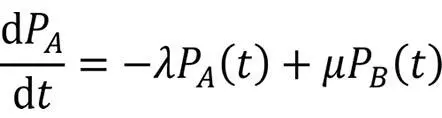
Die Reparaturrate μ ist entsprechend zu verstehen als Anzahl der Reparaturen bezogen auf die Zeiteinheit. Für die zeitliche Veränderung der Aufenthaltswahrscheinlichkeit in den Zuständen A oder B gilt schließlich:
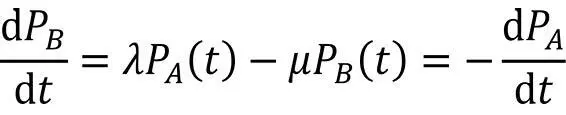
Mit welcher Wahrscheinlichkeit ist ein
System defekt, wenn man es zu einem
zufälligen Zeitpunkt betrachtet?
Die erste Gleichung bedeutet, dass die Änderung der Wahrscheinlichkeit, dass sich das System in Zustand A befindet, also funktionstüchtig ist, verursacht werden kann durch einen Wechsel von B (»defekt«) nach A (also positives Vorzeichen) abzüglich einer Bewegung von A nach B (negatives Vorzeichen). Eine ähnliche Interpretation findet sich für die zweite Gleichung, die eine Veränderung des Systems beschreibt, das sich in Zustand B befindet.
Es bleibt noch festzustellen, dass PA(t) + PB(t) = 1 gilt, da sich das System stets in einem der beiden Zustände befinden muss. Ohne Herleitung ergibt sich nach Lösung des Differenzialgleichungssystems für die Wahrscheinlichkeit, ein System mit gegebener Ausfall- und Reparaturrate im fehlerfreien Zustand anzutreffen, der Ausdruck
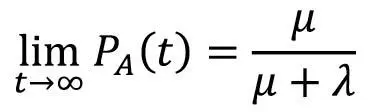
Wir haben eine quantitative
Aussage über die Zuverlässigkeit!
Auch dies kann eine interessante Aussage über die Zuverlässigkeit von reparierbaren Systemen sein, wenn Ausfall- und Reparaturrate bekannt sind.
2.2.4 Stochastische Zuverlässigkeitsanalyse für Software
Wir versuchen, Aussagen über das zu-
künftige Ausfallverhalten zu erhalten.
Mit Zuverlässigkeitsmodellen versucht man, durch Beobachtung des Ausfallverhaltens über einen bestimmten Zeitraum Prognosen über das zukünftig zu erwartende Ausfallverhalten zu erlangen. Zuverlässigkeitsmodelle werden häufig durch Kenngrößen parametriert, wobei die Parameter in einer Beobachtungsphase stochastisch ermittelt werden.
Fällt Software wirklich zufällig aus?
Die Aussagekraft der Ergebnisse von Softwarezuverlässigkeitsmodellen hängt natürlich stark von der Qualität der zugrunde liegenden Modelle ab, besitzt aber einen präventiven Charakter. Die Frage ist dabei allerdings, inwieweit Software überhaupt stochastisches Ausfallverhalten aufweist. Ein spontaner – also rein zufälliger – Ausfall ist zwar nicht möglich und Software verschleißt auch nicht, dennoch erscheint der Ausfall aus Sicht des Benutzers oft als durchaus zufällig und unmotiviert. Viele Softwarefehlerzustände, wie z. B. nichtinitialisierte Zeiger in der Sprache C, treten quasi zufällig auf, zumindest abhängig von zufälligen Speicherinhalten im nichtinitialisierten Arbeitsspeicher. Auch die Art und Intensität der Benutzung von Software beeinflusst die Häufigkeit, mit der vorhandene Fehler tatsächlich zutage treten.
Wenn Software aber stochastisches Ausfallverhalten aufweist, können Software und Hardware mit analogen Zuverlässigkeitsmodellen betrachtet werden, d. h., wir können Kenngrößen übertragen, die wir aus der Hardwarezuverlässigkeit kennen.
Lebensdauer T - wir ziehen eine Analogie
zwischen Software und Glühbirnen.
Interessant wäre zunächst die Lebensdauer T. Hinsichtlich der Lebensdauer als stochastischer Kenngröße bemühen wir hier die Analogie zu einem Kollektiv von sagen wir N = 1000 Glühbirnen, die eine gewisse Lebensdauer bis zu ihrem ersten (und letzten) Ausfall aufweisen. Bei N Glühbirnen ergibt sich eine Wahrscheinlichkeitsverteilungsfunktion F(t) für den Ausfall. Die Lebensdauer T repräsentiert hierbei die Zufallsvariable und F(t) die zugehörige Verteilungsfunktion. Es gilt: F(t1) ist die Wahrscheinlichkeit, dass der Ausfall in 0 ≤ t ≤ t1 erfolgt ist, die Lebensdauer also T ≤ t1 beträgt, und es ergibt sich

Überlebenswahrscheinlichkeit R(t)
R(t) bezeichnet die Überlebenswahrscheinlichkeit 1 − F(t), d. h. die Wahrscheinlichkeit, dass bis zum Zeitpunkt t noch kein Ausfall aufgetreten ist. Da F(t) die Verteilungsfunktion einer Zufallsvariable ist, ergibt sich als Wahrscheinlichkeitsdichtefunktion f (t) = dF(t) / dt.
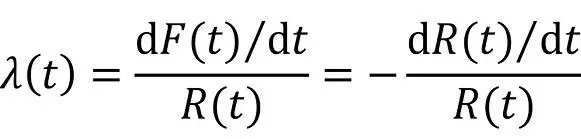
Ermittlung der Ausfallrate λ
Des Weiteren lässt sich eine Ausfallrate λ(t) bestimmen als Grenzwert der in einem Zeitintervall Δt ausgefallenen Einheiten pro Zeiteinheit bezogen auf die zu Beginn von Δt noch funktionsfähigen Elemente R(t) für Δt → 0:
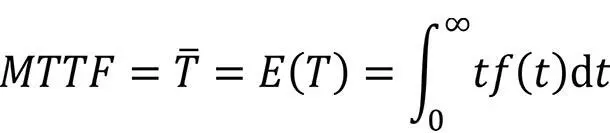
Die MTTF bzw. Mean Time between Failure (MTBF) bei reparierbaren Systemen ergibt sich gemäß der Definition des stochastischen Erwartungswerts E(T ) zu
Annahme eines exponentialverteilten
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Softwaretest in der Praxis»
Представляем Вашему вниманию похожие книги на «Softwaretest in der Praxis» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Softwaretest in der Praxis» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.