Position, Navigation, and Timing Technologies in the 21st Century
Здесь есть возможность читать онлайн «Position, Navigation, and Timing Technologies in the 21st Century» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Position, Navigation, and Timing Technologies in the 21st Century
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Position, Navigation, and Timing Technologies in the 21st Century: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Position, Navigation, and Timing Technologies in the 21st Century»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Volume 1 of
contains three parts and focuses on the satellite navigation systems, technologies, and engineering and scientific applications. It starts with a historical perspective of GPS development and other related PNT development. Current global and regional navigation satellite systems (GNSS and RNSS), their inter-operability, signal quality monitoring, satellite orbit and time synchronization, and ground- and satellite-based augmentation systems are examined. Recent progresses in satellite navigation receiver technologies and challenges for operations in multipath-rich urban environment, in handling spoofing and interference, and in ensuring PNT integrity are addressed. A section on satellite navigation for engineering and scientific applications finishes off the volume.
Volume 2 of
consists of three parts and addresses PNT using alternative signals and sensors and integrated PNT technologies for consumer and commercial applications. It looks at PNT using various radio signals-of-opportunity, atomic clock, optical, laser, magnetic field, celestial, MEMS and inertial sensors, as well as the concept of navigation from Low-Earth Orbiting (LEO) satellites. GNSS-INS integration, neuroscience of navigation, and animal navigation are also covered. The volume finishes off with a collection of work on contemporary PNT applications such as survey and mobile mapping, precision agriculture, wearable systems, automated driving, train control, commercial unmanned aircraft systems, aviation, and navigation in the unique Arctic environment.
In addition, this text:
Serves as a complete reference and handbook for professionals and students interested in the broad range of PNT subjects Includes chapters that focus on the latest developments in GNSS and other navigation sensors, techniques, and applications Illustrates interconnecting relationships between various types of technologies in order to assure more protected, tough, and accurate PNT
will appeal to all industry professionals, researchers, and academics involved with the science, engineering, and applications of position, navigation, and timing technologies.pnt21book.com
Position, Navigation, and Timing Technologies in the 21st Century — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Position, Navigation, and Timing Technologies in the 21st Century», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
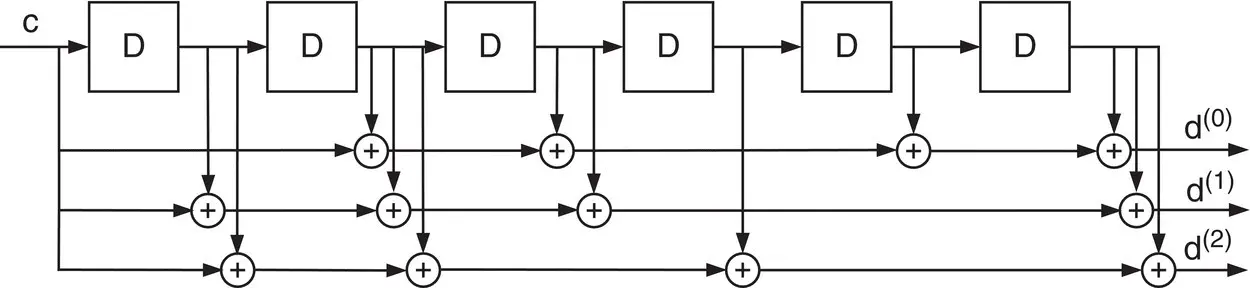
Figure 38.34 Tail biting convolutional encoder with constraint length 7 and coding rate 1/3 (Shamaei et al. [65]).
Source: Reproduced with permission of IEEE.

Figure 38.35 MIB channel decoding method (Shamaei et al. [65]).
Source: Reproduced with permission of IEEE.
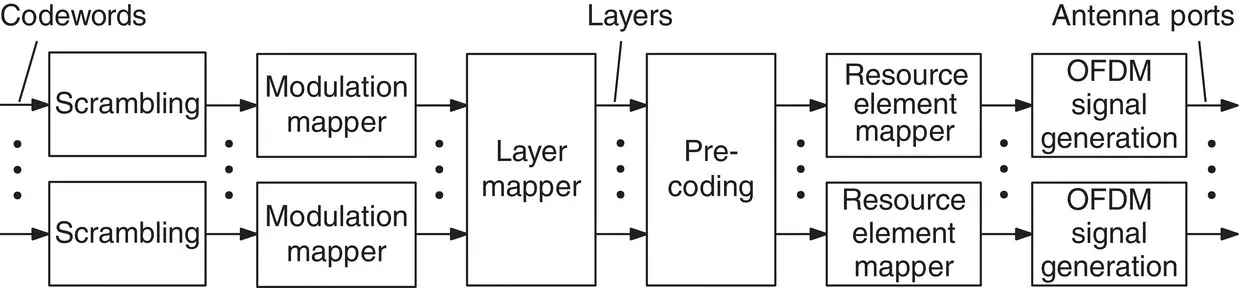
Figure 38.36 General structure of downlink physical channels (Shamaei et al. [64, 65]).
Source: Reproduced with permission of Institute of Navigation, IEEE.
The SIB contains information about (i) the eNodeB to which it is connected, (ii) inter‐ and intra‐frequency neighboring cells from the same operator, (iii) neighboring cells from other networks (UMTS, GSM, and cdma2000), and (iv) other information. The SIB has 17 different forms called SIB1 to SIB17, which are transmitted in different schedules. SIB1, which is transmitted in subframe 5 of every even frame, carries scheduling information of the other SIBs. This information can be used to extract the schedule of SIB4, which has the intra‐frequency neighboring cell IDs. To decode SIB1, the UE has to go through several steps. In each step, the UE needs to decode a physical channel to extract a parameter required to perform other steps.
In general, all the downlink physical channels are coded in a similar fashion before transmission, as shown in Figure 38.36. Although all the physical channels have the same general structure, each step in Figure 38.36differs from one channel to another. Each step for the PBCH was discussed in the MIB decoding step. Further details are given in [61, 70]. In the following, the steps to retrieve information from SIB4 are summarized.
PCFICH Decoding: The UE first obtains the control format information (CFI) from the physical control format indicator channel (PCFICH). The CFI specifies the number of REs dedicated to the downlink control channel and can take the values 1, 2, or 3. To decode the CFI, the UE first locates the 16 REs dedicated to the PCFICH. Then, it demodulates the obtained symbols by reversing the steps in Figure 38.36, which results in a sequence of 32 bits. Finally, this sequence, which can be only one of three possible sequences, is mapped onto a CFI value.
PDCCH Decoding: The UE can identify the REs associated with the physical downlink control channel (PDCCH) and demodulate them by knowing the CFI. This results in a block of bits corresponding to the downlink control information (DCI) message. The DCI can be transmitted in several formats, which is not communicated with the UE. Therefore, the UE must perform a blind search over different formats to unpack the DCI. The right format is identified by a CRC.
PDSCH Decoding: The parsed DCI provides the configuration of the corresponding physical downlink shared channel (PDSCH) REs. The PDSCH, which carries the SIB, is then decoded, resulting in the SIB bits. Subsequently, these bits are decoded using an Abstract Syntax Notation One (ASN.1) decoder, which extracts the system information sent on SIBs by the eNodeB.
System Information Extraction and Neighboring Cells Identification: During signal acquisition, the frame timing and the eNodeB cell ID are determined. Then, the MIB is decoded, and the bandwidth of the system as well as the frame number are extracted. This will allow the UE to demodulate the OFDM signal across the entire bandwidth and locate the SIB1 REs. The UE moves on to decode the SIB1 message, from which the scheduling for SIB4 is deduced and is subsequently decoded. SIB4 contains the cell ID of intra‐frequency neighboring cells as well as other information pertaining to these cells. Decoding this information gives the UE the ability to simultaneously track signals from different eNodeBs and produce TOA estimates from each of these eNodeBs. Signal tracking and TOA estimation will be thoroughly discussed in the next two subsections. Figure 38.37summarizes all the aforementioned system information extraction steps.
38.6.2.3 Tracking
After acquiring the LTE frame timing, a UE needs to keep tracking the frame timing for two reasons: (i) to produce a pseudorange measurement and (ii) to continuously reconstruct the frame. The PSS and SSS are two possible sequences that a UE can exploit to track the frame timing. The PSS has only three different sequences, making it less desirable to use in tracking the frame timing because (i) the interference from neighboring eNodeBs with the same sector IDs is high and (ii) the number of eNodeBs that the UE can simultaneously track is limited. The SSS is expressible in 168 different sequences; hence, it does not suffer from the same problems as the PSS. Therefore, the SSS will be used to track the frame timing. In this section, the components of the tracking loops are discussed, namely, an FLL‐assisted PLL and a carrier‐aided DLL.
FLL‐Assisted PLL:The frequency reuse factor in LTE systems is set to be 1, which results in high interference from neighboring cells. Under interference and dynamic stress, FLLs have better performance than PLLs. However, PLLs have significantly higher measurement accuracy compared to FLLs. An FLL‐assisted PLL has both the dynamic and interference robustness of FLLs and the high accuracy of PLLs [72]. The main components of an FLL‐assisted PLL are a phase discriminator, a phase loop filter, a frequency discriminator, a frequency loop filter, and an NCO. The SSS is not modulated with other data. Therefore, an atan2discriminator, which remains linear over the full input error range of ± π , could be used without the risk of introducing phase ambiguities, given by
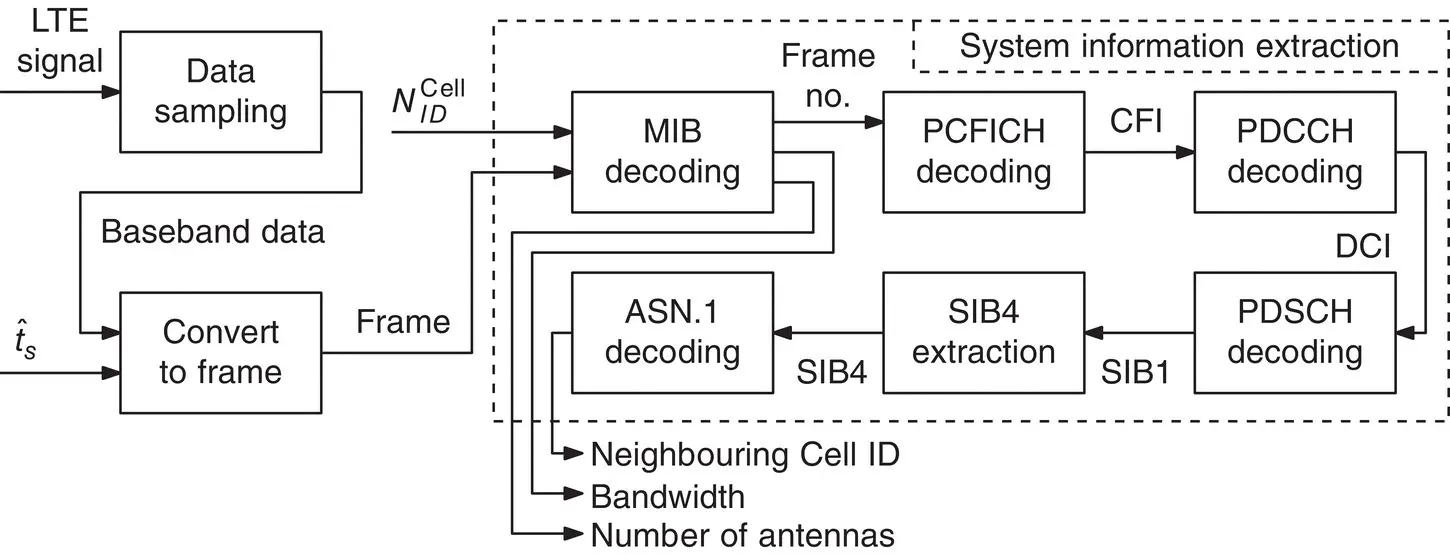
Figure 38.37 System information extraction block diagram (Shamaei et al. [64, 65]).
Source: Reproduced with permission of Institute of Navigation, IEEE.

where  is the prompt correlation at time step k . A third‐order PLL can be used to track the carrier phase, with a loop filter transfer function given by
is the prompt correlation at time step k . A third‐order PLL can be used to track the carrier phase, with a loop filter transfer function given by
(38.22) 
where ω n, pis the undamped natural frequency of the phase loop, which can be related to the PLL noise‐equivalent bandwidth  [54]. The output of the phase loop filter is the rate of change of the carrier phase error
[54]. The output of the phase loop filter is the rate of change of the carrier phase error  , expressed in rad/s, where
, expressed in rad/s, where  is the Doppler frequency estimate. The phase loop filter transfer function in Eq. (38.22)is discretized and realized in state space. The PLL is assisted by a second‐order FLL with an
is the Doppler frequency estimate. The phase loop filter transfer function in Eq. (38.22)is discretized and realized in state space. The PLL is assisted by a second‐order FLL with an atan2discriminator for the frequency as well. The frequency error at time step k is expressed as
Интервал:
Закладка:
Похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century»
Представляем Вашему вниманию похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.











Обсуждение, отзывы о книге «Position, Navigation, and Timing Technologies in the 21st Century» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.