Джон Ловин - Создаем робота-андроида своими руками
Здесь есть возможность читать онлайн «Джон Ловин - Создаем робота-андроида своими руками» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2007, ISBN: 2007, Издательство: Array Литагент «ДМК», Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Создаем робота-андроида своими руками
- Автор:
- Издательство:Array Литагент «ДМК»
- Жанр:
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Создаем робота-андроида своими руками: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Создаем робота-андроида своими руками»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Создаем робота-андроида своими руками», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
• (1) ИС буфер 4050
• Разное: макетная плата
Детали можно заказать в:Images Company, James Electronics, JDR MicroDevices и Radio Shack.
Для более подробной информации см. приложение в конце книги.
Глава 11
Шагающие роботы
Шагающие роботы представляют собой класс роботов, имитирующих передвижение животных или насекомых. Как правило, для передвижения роботы используют механические ноги. Передвижение с помощью ног насчитывает миллионы лет истории. По контрасту, история передвижения с помощью колеса началась от 10 до 7 тысяч лет назад. Колесное передвижение достаточно эффективно, но требует наличия относительно ровных дорог. Достаточно взглянуть на аэрофотосъемку города или его пригородов, чтобы заметить сеть переплетающихся дорог.
Цель создания шагающих роботов
Шагающие роботы могут передвигаться по пересеченной местности, недоступной для обычных колесных средств. С подобной целью обычно и создают шагающих роботов.
Имитация жизни
Совершенные шагающие роботы имитируют движения насекомых, ракообразных, и иногда – человека. Конструкции двуногих роботов редки, поскольку требуют для осуществления сложных инженерных решений. Я планирую рассмотреть проект двуногого робота в моей следующей книге с условным названием Pic-Robotics. В этой главе мы будем строить шестиногого шагающего робота.
Шесть ног – походка треножником
Используя модель с шестью ногами мы сможем продемонстрировать знаменитую походку «треножником», т е. с опорой на три ноги, которую используют большинство существ. На следующих рисунках темный кружок означает, что нога устойчиво поставлена на землю и поддерживает вес существа. Светлый кружок означает, что нога поднята и находится в движении.
На рис. 11.1 показано наше существо в позиции «стояния». Все ноги опираются о землю. Из положения «стояния» наше существо решает идти вперед. Для того чтобы сделать шаг, оно поднимает три из своих ног (см. светлые кружки на рис. 11.2), опираясь своим весом на три оставшиеся ноги (темные кружки). Заметьте, что ноги, поддерживающие вес (темные кружки), расположены в форме треножника (треугольника). Такая позиция является устойчивой, и наше существо не может упасть. Три остальные ноги (светлые кружки) могут двигаться и двигаются вперед. На рис. 11.3 показан момент движения поднятых ног. В этой точке вес существа перемещается с неподвижных на движущиеся ноги (см. рис. 11.4). Заметьте, что вес существа по-прежнему поддерживается треугольным расположением опорных ног. Затем таким же образом переставляется другая тройка ног, и цикл повторяется. Такой способ передвижения называется треножной походкой, поскольку вес тела существа в каждый момент времени поддерживается треугольным положением опорных ног.
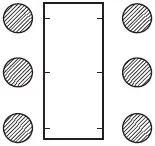
Рис. 11.1. Треножная походка. Исходное положение
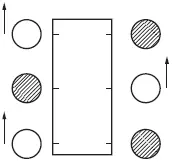
Рис. 11.2. Треножная походка, первый шаг вперед
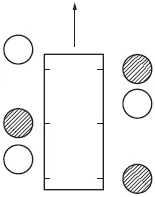
Рис. 11.3. Треножная походка, второе движение, перенос центра тяжести
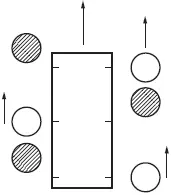
Рис. 11.4. Треножная походка, третье движение
Создание шагающего робота
Существует много моделей небольших заводных шагающих игрушек. Такие игрушечные «пешеходы» передвигают ногами вверх-вниз и вперед-назад с помощью кулачковых механизмов. Хотя такие конструкции вполне способны «шагать», а некоторые делают это достаточно проворно, нашей целью является создание шагающего робота, не использующего кулачковые механизмы для имитации шагового передвижения.
Мы будем строить робота, имитирующего треножную походку. Роботу, описанному в этой главе, требуется три сервомотора для передвижения. Существуют другие шестиногие и четырехногие модели шагающих роботов, которые требуют больших степеней свободы в своих ногах. Соответственно, наличие большего количества степеней свободы требует большего количества управляющих механизмов для каждой из ног. Если для этой цели используются сервомоторы, то для каждой ноги потребуются два, три или даже четыре двигателя.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Создаем робота-андроида своими руками»
Представляем Вашему вниманию похожие книги на «Создаем робота-андроида своими руками» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Создаем робота-андроида своими руками» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.