Джон Ловин - Создаем робота-андроида своими руками
Здесь есть возможность читать онлайн «Джон Ловин - Создаем робота-андроида своими руками» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2007, ISBN: 2007, Издательство: Array Литагент «ДМК», Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Создаем робота-андроида своими руками
- Автор:
- Издательство:Array Литагент «ДМК»
- Жанр:
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Создаем робота-андроида своими руками: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Создаем робота-андроида своими руками»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Создаем робота-андроида своими руками», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
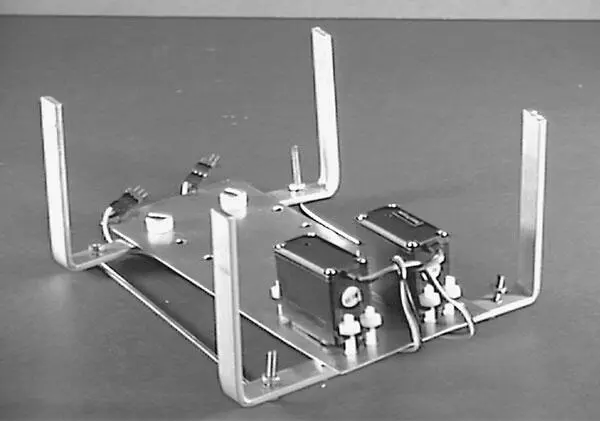
Рис. 11.11. Шестиног – вид снизу. Спереди два сервомотора
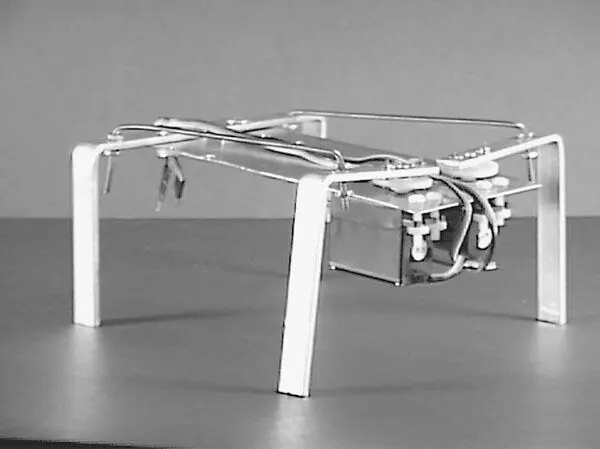
Рис. 11.12. Частично собранный шестиног с двумя передними сервомоторами
Центральный сервомотор
Для крепления центрального сервомотора потребуются две Г-образные скобы (см. рис. 11.13). Просверлите соответствующие отверстия в алюминиевых полосках и согните их под углом 90°, чтобы получились скобы. Прикрепите две Г-образные скобы к центральному сервомотору с помощью пластиковых винтов и гаек (см. рис. 11.14). Затем прикрепите узел центрального сервомотора к нижней части основания. Совместите четыре отверстия на основании с отверстиями на верхней части Г-образных скоб. Скрепите части с помощью пластиковых винтов и гаек. На рис. 11.15 и 11.16 приведены фотографии вида сверху и снизу для шестиногого робота.
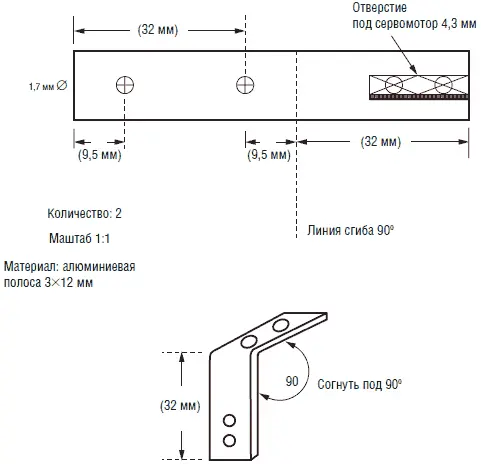
Рис. 11.13. Скоба центрального сервомотора
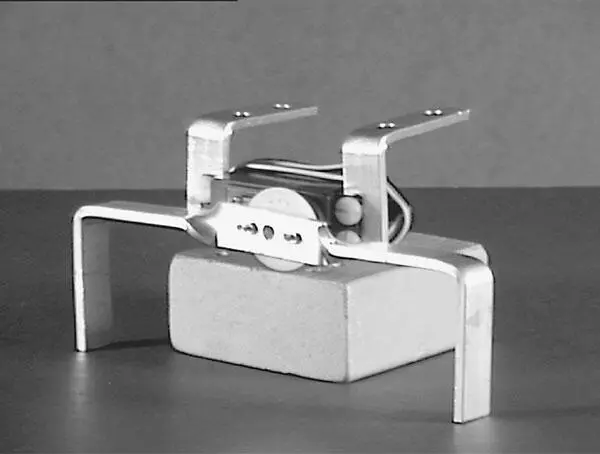
Рис. 11.14. Центральный мотор в сборе с крепежными скобами и средними ногами
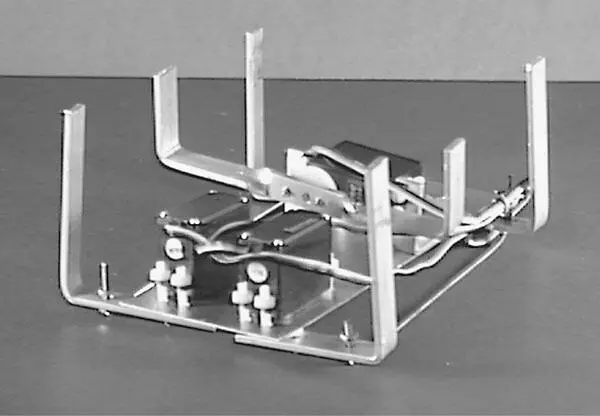
Рис. 11.15. Шестиног – вид снизу с тремя сервомоторами
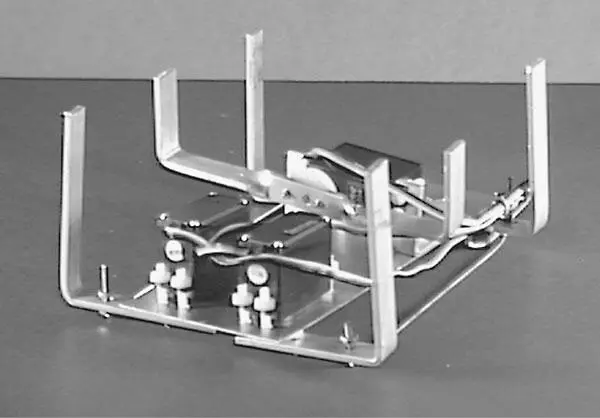
Рис. 11.16. Шестиног в сборе. Конструкция готова для монтажа электронного управления
Электрическая часть
На рис. 11.17 приведена схема управления сервомоторами с помощью PIC-микроконтроллера. Питание сервомоторов и микроконтроллера осуществляется от батареи 6 В. Батарейный отсек 6 В содержит 4 элемента АА. Схема микроконтроллера собрана на небольшой макетной плате. Батарейный отсек и схема прикреплены сверху к алюминиевому основанию. На рис 11.5 показана готовая конструкция робота, готовая к «передвижению».
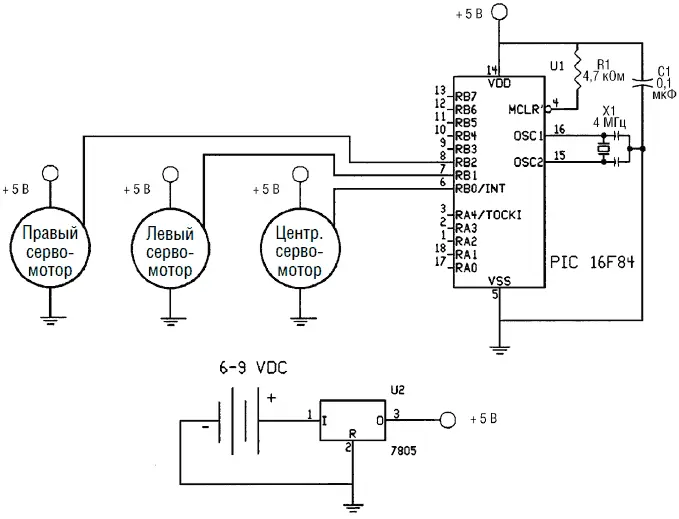
Рис. 11.17. Принципиальная схема управления шестиногого робота
Программа для микроконтроллера
Микроконтроллер 16F84 управляет работой трех сервомоторов. Наличие большого числа незадействованных шин ввода/вывода и места под программу предоставляет возможность совершенствования и модификации базовой модели робота.
Программа PICBASIC
‘Шестиногий шагающий робот
‘Соединения
‘Левый сервомотор Pin RB1
‘Правый сервомотор Pin RB2
‘Сервомотор наклона Pin RB0
‘Движение только вперед
start:
for B0 = 1 to 60
pulsout 0, 155 ‘Наклон по часовой стрелке, подъем правой стороны
pulsout 1, 145 ‘Левые ноги на месте
pulsout 2, 145 ‘Правые ноги движутся вперед
pause 18
next B0
for B0 = 1 to 60
pulsout 0, 190 ‘Наклон против часовой стрелки, подъем левой стороны
pulsout 1, 200 ‘Левые ноги движутся вперед
pulsout 2, 145 ‘Правые ноги сохраняют положение вперед
pause 18
next B0
for B0 = 1 to 15
pulsout 0, 172 ‘Среднее положение, отсутствие наклона
pulsout 1, 200 ‘Левые ноги сохраняют положение вперед
pulsout 2,145 ‘Правые ноги сохраняют положение вперед
pause 18
next B0
for B0 = 1 to 60
pulsout 0, 172 ‘Среднее положение, отсутствие наклона
pulsout 1, 145 ‘Движение левых ног назад
pulsout 2, 200 ‘Движение правых ног назад
pause 18
next B0
goto start
На команду pulsout не все сервомоторы реагируют одинаковым образом. Возможно, что для создания робота вы приобретете сервомоторы, характеристики которых будут слегка отличаться от тех, которые были использованы мной. В этом случае обратите внимание на то, что параметры команды pulsout, которая определяет положение ротора сервомотора, должны быть подстроены. В этом случае необходимо подобрать численные значения параметров pulsout, которые бы соответствовали тому типу сервомотора, который использован в вашей конструкции шестиногого робота.
Данная программа на PICBASIC позволяет роботу двигаться только в прямом направлении, однако, немного изменив программу, конструктор может заставить робота двигаться назад и совершать повороты вправо и влево. Установка нескольких сенсорных датчиков может информировать робота о наличии препятствий.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Создаем робота-андроида своими руками»
Представляем Вашему вниманию похожие книги на «Создаем робота-андроида своими руками» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Создаем робота-андроида своими руками» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.