Джон Ловин - Создаем робота-андроида своими руками
Здесь есть возможность читать онлайн «Джон Ловин - Создаем робота-андроида своими руками» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2007, ISBN: 2007, Издательство: Array Литагент «ДМК», Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Создаем робота-андроида своими руками
- Автор:
- Издательство:Array Литагент «ДМК»
- Жанр:
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Создаем робота-андроида своими руками: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Создаем робота-андроида своими руками»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Создаем робота-андроида своими руками», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Необходимость в таком количестве сервомоторов (приводов) диктуется тем, что требуется как минимум две степени свободы. Одна для опускания и поднимания ноги, а другая – для движения ее вперед-назад.
Шагающий робот с тремя сервомоторами
Шагающий робот, которого мы собираемся сделать, является компромиссным решением по замыслу и конструкции и требует наличия всего трех сервомоторов. Однако даже в этом случае он обеспечивает передвижение с помощью треножной походки. В нашей конструкции использованы три облегченных сервомотора HS300 (крутящий момент 1,3 кгс) и микроконтроллер 16F84-04.
Работа устройства
Перед тем как мы приступим к конструированию робота, посмотрим на готового робота, изображенного на рис. 11.5, и проанализируем, как робот осуществляет передвижение. Треножная походка, которая использована в данной конструкции, является не единственно возможной.
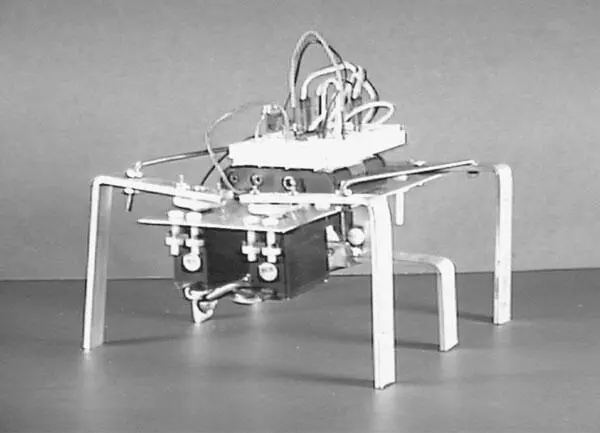
Рис. 11.5. Шестиногий ходок готов к прогулке
В передней части робота закреплены два сервомотора. Каждый из сервомоторов управляет движением передней и задней ног с соответствующей стороны робота. Передняя нога прикреплена непосредственно к ротору сервомотора и способна качаться вперед и назад. Задняя нога соединена с передней при помощи тяги. Тяга позволяет задней ноге повторять движения передней ноги вперед-назад. Две центральные ноги управляются третьим сервомотором. Этот сервомотор поворачивает центральные ноги вдоль продольной оси на угол от 20° до 30° по часовой стрелке и против часовой стрелки, что наклоняет робот вправо или влево.
Используя информацию о механизме привода ног, мы сейчас посмотрим, как наш робот будет передвигаться. Посмотрим на рис. 11.6. Мы начнем с положения покоя. Каждый кружок отмечает положение ноги. Как и в предыдущем случае, темные кружки показывают положение опорных ног. Обратите внимание, что в положении покоя средние ноги не являются опорными. Эти ноги на 3 мм короче передних и задних ног.
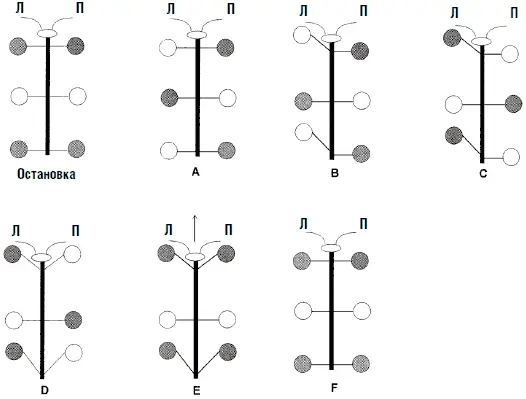
Рис. 11.6. Фазы движения шестинога
В позиции А центральные ноги поворачиваются по часовой стрелке на угол примерно 20° от центрального положения. Это приводит к наклону робота вправо. В данной позиции вес робота удерживается правой передней и задней ногами и левой центральной ногой. Это стандартная позиция «треножника», которая была описана выше. Поскольку левая передняя и левая задняя нога оказываются «в воздухе», то их можно передвинуть вперед, как показано на рис 11.6, позиция В.
В позиции С центральные ноги поворачиваются против часовой стрелки на угол примерно 20° от центральной позиции. Это приводит к наклону робота влево. В данной позиции вес робота распределяется между левой передней и задней ногами и правой средней ногой. Теперь правая передняя и задняя ноги не несут нагрузки и могут быть передвинуты вперед, как это показано на поз. D рис. 11.6.
В позиции Е центральные ноги возвращаются в среднее положение. В такой позиции робот «стоит» прямо и опирается только на передние и задние ноги. В позиции F передние и задние ноги одновременно перемещаются назад, а робот соответственно – вперед. Далее цикл движения повторяется.
Это был первый способ хождения, который я попробовал воспроизвести, и эта система работает. Вы можете разработать, совершенствовать и конструировать другие модели способов хождения, с которыми можно проводить эксперименты. Я оставлю вам разработку способов хождения назад (реверсирование) и поворотов направо и налево. Я буду продолжать совершенствовать этого робота, добавляя датчики наличия стен и препятствий, а также способов перемещения назад и поворотов.
Конструкция робота
За основу «тела» робота я взял лист алюминия размерами 200х75х0,8 мм. Сервомоторы прикреплены к передней части пластины (см. рис. 11.7). Разметка отверстий под сервомоторы должна быть скопирована с чертежа и перенесена на лист алюминия. Такое копирование обеспечит точность положения отверстий под крепления сервомоторов. Четыре отверстия диаметром 4,3 мм расположены немного позади средней линии и предназначены для крепления центрального сервомотора. Эти четыре отверстия смещены к правому краю. Это необходимо сделать для того, чтобы фланец центрального сервомотора находился точно по центру «тела». Два задних отверстия предназначены для подвижного крепления задних ног.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Создаем робота-андроида своими руками»
Представляем Вашему вниманию похожие книги на «Создаем робота-андроида своими руками» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Создаем робота-андроида своими руками» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.