Джон Ловин - Создаем робота-андроида своими руками
Здесь есть возможность читать онлайн «Джон Ловин - Создаем робота-андроида своими руками» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2007, ISBN: 2007, Издательство: Array Литагент «ДМК», Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Создаем робота-андроида своими руками
- Автор:
- Издательство:Array Литагент «ДМК»
- Жанр:
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Создаем робота-андроида своими руками: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Создаем робота-андроида своими руками»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Создаем робота-андроида своими руками», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Использование PIC-микроконтроллера и ИС UCN-5804 для управления ШД
Мы использовали схему управления работой ШД непосредственно с помощью ИС PIC. Также для управления работой ШД мы использовали специализированную ИС. При совместном использовании специализированной ИС и PIC-микроконтроллера мы можем объединить преимущества, характерные для каждой из схем. ИС UCN-5804 в этом случае выполняет всю «черновую» работу по управлению работой ШД. При некотором усложнении конечной электрической схемы программа управления PIC может быть сильно упрощена, что является хорошим решением.
Принципиальная схема устройства управления ШД с использованием специализированной ИС показана на рис. 10.15, а фотография устройства приведена на рис. 10.16. Питание ИС UCN-5804 осуществляется от источника постоянного тока напряжением 5 В. При напряжении питания 5 В управляющие работой ШД напряжения могут достигать 35 В.
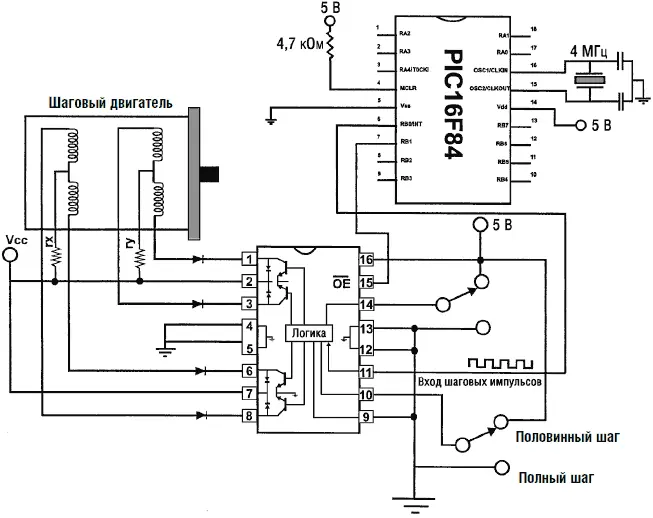
Рис. 10.15. Схема микроконтроллера шагового двигателя
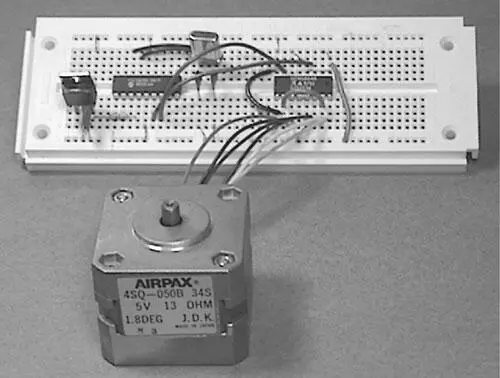
Рис. 10.16. Принципиальная схема микроконтроллера и ИС управления шаговым двигателем
Обратите внимание, что на схеме присутствуют два резистора, обозначенные «rx» и «ry» без указания их номинала. Наличие или отсутствие этих резисторов определяется типом применяемого ШД. Целью введения этих резисторов является ограничение выходного тока, протекающего через ШД, значением 1,25 А (в случае необходимости).
Рассмотрим наш ШД с напряжением питания 5 В. Его обмотки имеют сопротивление 13 Ом. Ток, протекающий через обмотки, составляет 5В/130 м=0,385А, или 385 мА, что значительно ниже максимально разрешенного значения тока 1,25 А для ИС UCN-5804. Поэтому для данного случая резисторы rx и ry не требуются и могут быть исключены из схемы.
Перед тем как мы двинемся дальше, рассмотрим еще один случай. ШД с напряжением питания 12 В имеет сопротивление обмоток 6 Ом. Ток, протекающий через обмотки ШД, составит 12 В/6 Ом=2 А. Такое значение тока превышает максимально допустимое для ИС UCN-5804. Для использование данного ШД резисторы rx и ry необходимы. Для обеспечения одинакового крутящего момента для каждой фазы сопротивления rx и ry должны быть равны. Величины резисторов должны ограничивать ток до величины 1,25 А или ниже. В данном случае сопротивление резисторов должно быть не менее 4 Ом (при мощности от 5 до 10 Вт). При включении резисторов значение тока составит 12 В/10 Ом = 1,20 А.
Уровни входов ИС UCN-5804 совместимы с выходами КМОП– и ТТЛ-логики. Это означает, что для нормальной работы схемы мы можем непосредственно соединить входы ИС с шинами выхода PIC-микроконтроллера. Входные тактовые импульсы (вывод 11) для ИС UCN-5804 генерируются PIC-микроконтроллером. Вывод управления выходом разрешает вращение ШД при подаче сигнала низкого уровня и останавливает ШД при сигнале высокого уровня.
Выводы 10 и 14 ИС UCN-5804 управляются переключателями, подающими сигналы высокого или низкого уровня. Вывод 10 управляет режимами полного или половинного шага, а вывод 14 управляет направлением вращения. При желании этими функциями можно управлять с помощью PIC. Для управления на соответствующие выводы подаются сигналы высокого или низкого уровня аналогично управлению работой выхода ИС.
Программа на PICBASIC для обеспечения работы схемы имеет следующий вид:
‘Управление шаговым двигателем через ИС UCN 5804
Symbol TRISB = 134 ‘Инициализировать TRISB как 134
Symbol PortB = 6 ‘Инициализировать PortB как 6
Poke TRISB,0 ‘Установить шины PORTB на выход
low1 ‘Установить выход на низкий уровень
start:
pulsout 0, 10000 ‘Подача 10 мс импульсов на UCN 5804
goto start ‘Повторение
В этом случае я снова написал простейшую «базовую» программу, чтобы показать, насколько просто осуществляется управление вращением ШД. Конечно, вы можете дополнить программу управлением частотой импульсов, направлением вращения и т. д.
Список деталей для контроллера ШД
• (1) микроконтроллер 16F84
• (2) конденсатор 22 пФ
• (1) кварцевый резонатор 4 МГц
• (1) резистор 4,7 кОм, 0,25 Вт
• (1) ИС таймер 555
• (1) ИС контроллер ШД UCN-5804B
• (1) Шаговый двигатель (однополярный с 6 выводами)
• (1) Понижающий трансформатор
• (6) диод 1N914
• (4) транзистор TIP 120 NPN
• (1) ИС регулятор напряжения (7805, 7812)
• (1) диодный мост 50 В, 1 А
• (1) конденсатор 150 мкФ
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Создаем робота-андроида своими руками»
Представляем Вашему вниманию похожие книги на «Создаем робота-андроида своими руками» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Создаем робота-андроида своими руками» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.