Джон Ловин - Создаем робота-андроида своими руками
Здесь есть возможность читать онлайн «Джон Ловин - Создаем робота-андроида своими руками» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2007, ISBN: 2007, Издательство: Array Литагент «ДМК», Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Создаем робота-андроида своими руками
- Автор:
- Издательство:Array Литагент «ДМК»
- Жанр:
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Создаем робота-андроида своими руками: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Создаем робота-андроида своими руками»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Создаем робота-андроида своими руками», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Вывод 15 управляет статусом выхода. Когда на этот вывод подается высокий потенциал, то все выходы ИС отключаются. Если эта функция не требуется для вашей конструкции, то необходимо соединить этот вывод с землей (низкий уровень).
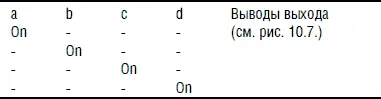
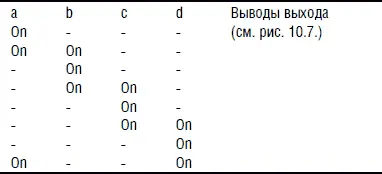
Вывод 14 определяет направление вращения. Когда этот вывод имеет потенциал низкого уровня или соединен с земляной шиной, то направление вращения определяется таблицей 10.1 или 10.2, которая читается сверху вниз. Когда на этом выводе имеется высокий потенциал (15В), то направление вращения сменяется на противоположное и определяется таблицами, читаемыми снизу вверх.
Применение ИС UCN-5804
На рис. 10.8 изображена схема управления ШД с использованием ИС UCN-5804. Тактовые импульсы вырабатываются с помощью таймера ИС 555. Частота тактовых импульсов может быть увеличена или уменьшена с помощью переменного резистора V1. Изменение частоты тактовых импульсов непосредственно управляет скоростью вращения ШД. В этой главе мы также покажем, как можно управлять ШД с помощью PIC-микроконтроллера непосредственно или с использованием дополнительных схем.
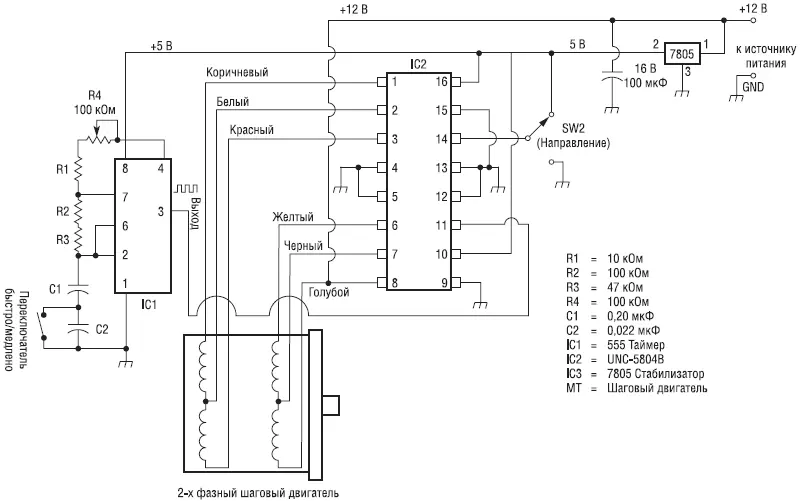
Рис. 10.8. Основная принципиальная схема управления вращением шагового двигателя
В этой схеме управление дополнительными функциями осуществляется с помощью трех выключателей. Выводы ИС, с которыми соединены эти выключатели, могут также управляться с помощью шин ввода/вывода микроконтроллера того же типа. Выключатель, соединенный с выводом 15, управляет состоянием выхода. При подаче высокого потенциала выход ИС UCN-5804 отключается и происходит остановка ШД.
Выключатель, соединенный с выводом 14, управляет направлением вращения ШД (по часовой стрелке или против часовой стрелки). Переключатель, соединенный с выводом 10 ИС UCN-5804, переключает ШД в режим полного или половинного шага. Когда на вывод 10 подан высокий потенциал, то ШД находится в режиме половинного шага. Такой режим удваивает разрешение ШД. Например, двигатель, который мы используем, имеет разрешение 1,8° на шаг. При включении режима половинного шага разрешение увеличится до 0,9° на шаг, и соответственно скорость вращения уменьшится вдвое. При подаче на вывод 10 низкого уровня ШД переключится в режим полного шага.
Присоединение ведущего колеса к валу ШД
Присоединение ведущего колеса к валу ШД может представлять определенную проблему. На рис. 10.9 показан один из вариантов ее простого решения. Найдите пластмассовую шестерню большого диаметра с фиксирующим винтом. Осевое отверстие шестерни должно совпадать с диаметром вала ШД. Приложите шестерню к ведущему колесу по центру. Просверлите три сквозных отверстия на окружности шестерни через 120°. Скрепите ведущее колесо и шестерню с помощью винтов, гаек и шайб. Затем наденьте шестерню на вал ШД и закрепите ее фиксирующим винтом.
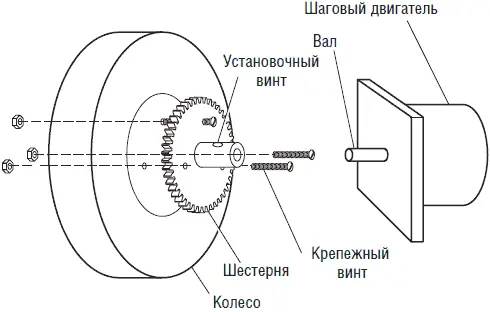
Рис. 10.9. Соединение ведущего колеса с валом двигателя
Использование микроконтроллера для управления ШД
Для изучения принципов работы ШД изготовим схему управления ШД с помощью микроконтроллера PIC 16F84.
Начальная схема управления
На рис. 10.10 показан первый тестовый вариант схемы управления ШД. Для буферизации выходных сигналов с шин PIC 16F84 использованы шестнадцатеричные буферы типа 4050. Сигнал с выхода каждого буфера подается на транзистор NPN типа. В качестве таких транзисторов в действительности использованы NPN транзисторы TIP 120 Darlington, но на схеме они обозначены как обычные NPN транзисторы. Транзисторы TIP 120 использованы в схеме в качестве электронных ключей, обеспечивающих своевременное включение обмоток ШД.
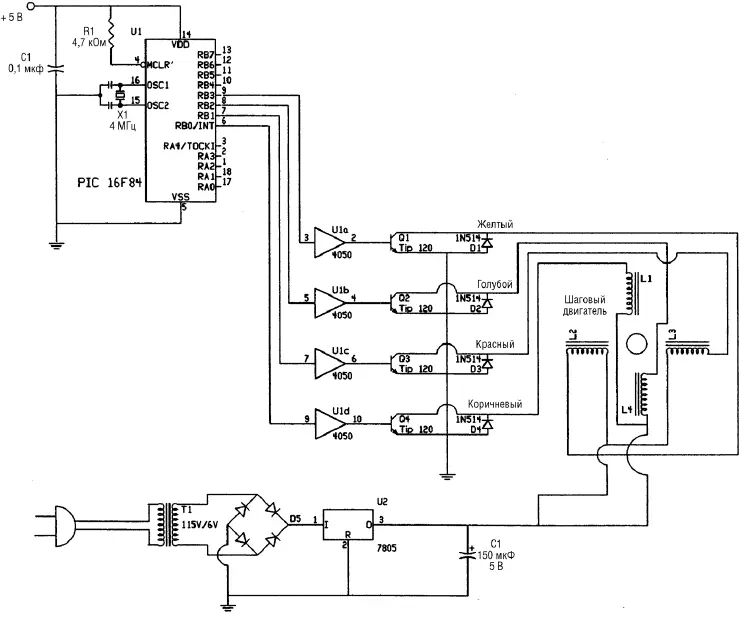
Рис. 10.10. Схема микроконтроллера шагового двигателя
Диоды, включенные параллельно транзисторам, обеспечивают гашение импульсов тока, возникающих в индуктивностях обмоток ШД. Диоды обеспечивают безопасную блокировку обратных токов. Если исключить диоды из схемы, то многократно возрастет вероятность пробоя транзисторов обратным током.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Создаем робота-андроида своими руками»
Представляем Вашему вниманию похожие книги на «Создаем робота-андроида своими руками» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Создаем робота-андроида своими руками» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.