Джон Ловин - Создаем робота-андроида своими руками
Здесь есть возможность читать онлайн «Джон Ловин - Создаем робота-андроида своими руками» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2007, ISBN: 2007, Издательство: Array Литагент «ДМК», Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Создаем робота-андроида своими руками
- Автор:
- Издательство:Array Литагент «ДМК»
- Жанр:
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Создаем робота-андроида своими руками: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Создаем робота-андроида своими руками»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Создаем робота-андроида своими руками», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Существуют шаговые двигатели, имеющие четыре вывода. Такие шаговые двигатели называются биполярными и имеют две обмотки, каждая из которых имеет два вывода. Хотя конструкция такого двигателя проще тех, которые мы используем, она требует более сложной схемы управления его вращением. Такая схема должна менять направление тока в обмотках после совершения шага.
Реальные типы ШД
Шаговый двигатель в рассмотренном примере имел угол поворота 90° на шаг. Статоры и роторы реальных шаговых двигателей представляют собой последовательности мини-полюсов. Мини-полюса уменьшают угол поворота на шаги улучшают разрешение шагового двигателя. Схема шагового двигателя на рис. 10.5 представляется более сложной, однако принцип его работы идентичен рис. 10.3 и 10.4.
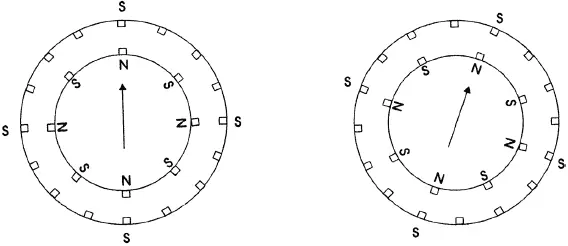
Рис. 10.5. Многополюсное управление
Ротор двигателя на рис. 10.5 поворачивается по часовой стрелке. В исходной позиции северный полюс постоянного магнита ротора притянут к южному полюсу электромагнита статора. Заметим, что таких пар магнитов, притянутых разноименными полюсами, несколько. Во втором положении цепочка электромагнитов выключается, и включается следующая по ходу часовой стрелки цепочка. Это приводит к повороту ротора по часовой стрелке на строго определенный угол. Это продолжается таким же образом и для следующих шагов. После восьми шагов цикл завершается и начинается повторение. Поворот на половинный шаг аналогичен описанному выше.
На рис. 10.6 показана схема однополярного шагового двигателя. Двигатель имеет шесть выводов, выходящих из корпуса. Как видно из рис. 10.6, обмотки соединены попарно последовательно и имеют выводы от средней точки. Если вы только что взяли в руки подобный шаговый двигатель и ничего не знаете о нем, то простейшим способом будет измерение электрического сопротивления между выводами. Составив таблицу соответствия между цветами проводов выводов и электрическими сопротивлениями между ними, вы быстро разберетесь, какие выводы соответствуют каким обмоткам. (В некоторых случаях шаговый двигатель имеет только пять выводов. В этом случае средние точки обмоток соединены между собой).
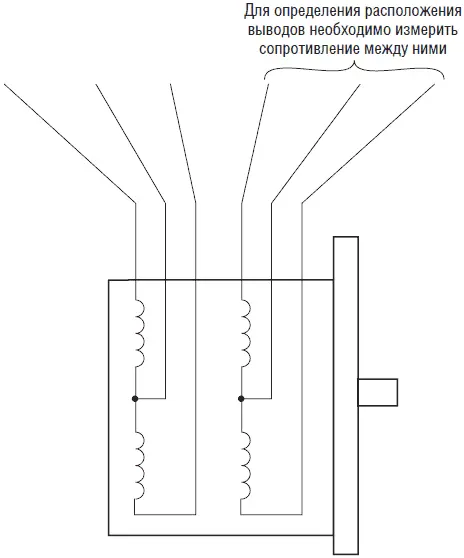
Рис. 10.6. Принципиальная схема шестиполюсного шагового двигателя
Двигатель, который мы будем использовать, имеет сопротивление 100 Ом между центральным выводом и концом обмотки, и соответственно, 220 Ом между концами обмоток. Понятно, что сопротивление между несвязанными между собой обмотками будет равно бесконечности (нет соединения). Снабженные этой информацией, мы легко сможем определить распайку выводов обмоток любого двигателя с шестью выводами. Шаговый двигатель, который мы будем использовать, имеет угол поворота 1,8° на шаг.
ИС UCN-5804
На рис. 10.7 изображена цоколевка ИС UCN-5804. ИС предназначена для управления и запитки четырехфазного однополярного шагового двигателя, который мы будем использовать в нашей конструкции. ИС UCN-5804 имеет следующие параметры:
• Максимальный выходной ток в непрерывном режиме 1,25 А
• Величина опорного напряжения 35 В
• Управление полным и половинным шагом
• Управление состоянием выхода и направлением вращения
• Встроенные защитные диоды
• Автоматический сброс при включении
• Внутренняя защита от тепловых перегрузок
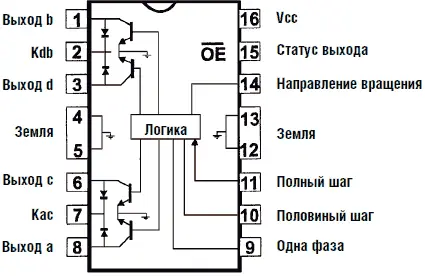
Рис. 10.7. ИС UCN-5804 контроллер шагового двигателя
ИС обеспечивает в непрерывном режиме максимальный выходной ток 1,35 А на фазу при опорном напряжении 35 В. Это оказывается более чем достаточным при управлении 12 вольтовым шаговым двигателем. Необходимый выходной ток для такого двигателя составляет (12В/110О м = 0,11 А), т. е. примерно 1/10 ампера.
Последовательность выходных импульсов, определяемая внутренней логикой UCN-5804, запускается прямоугольными импульсами, поступающими на вывод 11. Каждый прямоугольный импульс, поданный на этот вывод, своим отрицательным фронтом запускает перемещение ШД на один шаг.
Порядок включения обмоток определяется таблицей. После того как таблица заканчивается, последовательность повторяется с начала таблицы. Для реверсирования направления вращения ШД последовательность включения обмоток определяется по таблице снизу вверх.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Создаем робота-андроида своими руками»
Представляем Вашему вниманию похожие книги на «Создаем робота-андроида своими руками» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Создаем робота-андроида своими руками» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.