Джон Ловин - Создаем робота-андроида своими руками
Здесь есть возможность читать онлайн «Джон Ловин - Создаем робота-андроида своими руками» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2007, ISBN: 2007, Издательство: Array Литагент «ДМК», Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Создаем робота-андроида своими руками
- Автор:
- Издательство:Array Литагент «ДМК»
- Жанр:
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Создаем робота-андроида своими руками: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Создаем робота-андроида своими руками»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Создаем робота-андроида своими руками», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Шаговые двигатели
На рис 10.11. изображена эквивалентная электрическая схема используемого нами двигателя. Двигатель имеет шесть проводников, выходящих из его корпуса.
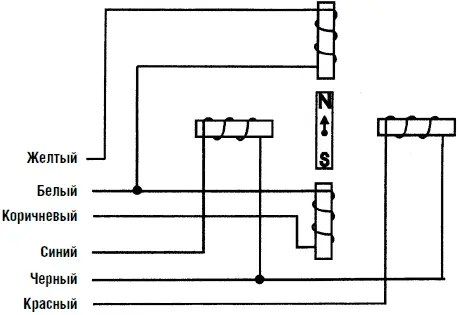
Рис. 10.11. Схема выводов однополярного шагового двигателя
Предположим, что мы только что взяли двигатель в руки и ничего не знаем о его внутреннем строении. Как я уже говорил ранее, наиболее простым путем выяснить внутреннюю распайку обмоток является измерение электрического сопротивления между выводами. Составив таблицу сопротивлений, измеренных между выводами, вы легко определите, какой вывод присоединен к какой из обмоток.
На рис. 10.12 изображено, какие сопротивления имеет используемый нами двигатель. Между центральным выводом и концами обмоток сопротивление составляет 13 Ом, соответственно между концами обмоток сопротивление имеет значение 26 Ом. Сопротивление между парами соединенных обмоток равно, соответственно, бесконечности (отсутствие соединения). Например, если мы измерим сопротивление между коричневым и голубым проводником, то прибор покажет бесконечность. Вооружившись этими данными, мы сможем правильно включить обмотки ШД в схему.
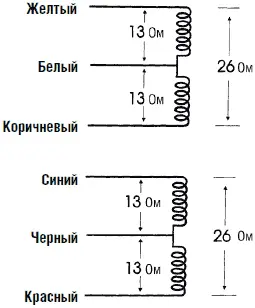
Рис. 10.12. Сопротивление между выводами однополярного шагового двигателя
Программа для тестовой схемы управления
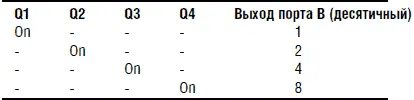
После того как тестовая схема управления изготовлена, необходимо запрограммировать PIC-микроконтроллер с помощью следующей программы на языке BASIC. Программа является очень простой и короткой, чтобы показать, насколько просто обеспечить вращение ШД. В таблице 10.3 показано, как на каждом шаге включается соответствующий транзистор. Используйте таблицу 10.3 для слежения за логикой BASIC программы. Когда вы достигаете до конца таблицы, то последовательность повторяется, начиная с начала.
‘Контроллер шагового двигателя
Symbol TRISB = 134 ‘Инициализировать TRISB как 134
Symbol PortB = 6 ‘Инициализировать PortB как 6
Symbol ti = b6 ‘Инициализировать ti как задержку
ti = 25 ‘Задержка 25 мс
poke TRISB,0 ‘Установить шины PORTB на выход
start: ‘Последовательность движения вперед
poke portb,1 ‘Шаг 1
pause ti ‘Задержка
poke portb,2 ‘Шаг 2
pause ti ‘Задержка
poke portb,4 ‘Шаг 3
pause ti ‘Задержка
poke portb,8 ‘Шаг 4
pause ti ‘Задержка
goto start ‘Повторение
При полном шаге для завершения полного оборота ШД требуется 200 импульсов (360° /1,8° на шаг). Подсчет количества импульсов позволяет PIC-микроконтроллеру управлять и позиционировать ротор ШД.
Вторая программа на PICBASIC
Вторая программа на PICBASIC является гораздо более гибкой. Пользователь может изменять параметры программы (время задержки) во время ее работы с помощью одного из четырех выключателей, соединенных с портом А. При нажатии кнопки 1 время задержки между импульсами увеличивается, и соответственно ротор ШД вращается медленнее. Кнопка 2 обладает противоположным действием. При нажатии кнопки 3 двигатель останавливается и находится в режиме ожидания, пока эта кнопка нажата. Кнопка 4 управляет направлением вращения ШД (по часовой стрелке или против часовой стрелки). Нажатие кнопки 4 изменяет направление вращения на противоположное. Реверсирование направления вращения сохраняется на все время нажатия кнопки.
‘Контроллер вращения ШД
Symbol TRISB = 134 ‘Инициализация TRISB как 134
Symbol TRISA = 133 ‘Инициализация TRISA как 133
Symbol PortB = 6 ‘Инициализация portb как 6
Symbol PortA = 5 ‘Инициализация porta как 5
symbol ti = b6 ‘Начальное время задержки
ti = 100 ‘Установка времени задержки 100 мс
Poke TRISB,0 ‘Установка PORTB как выхода
start: ‘Вращение ШД вперед
poke portb, 1 ‘Шаг 1
pause ti ‘Задержка
poke portb,2 ‘Шаг 2
pause ti ‘Задержка
poke portb,4 ‘Шаг 3
pause ti ‘Задержка
poke portb,8 ‘Шаг 4
pause ti ‘Задержка
goto check ‘Переход на проверку состояния кнопок
start2: ‘Вращение ШД назад
poke portb,8 ‘Шаг 1
pause ti ‘Задержка
poke portb,4 ‘Шаг 2
pause ti ‘Задержка
poke portb,2 ‘Шаг 3
pause ti ‘Задержка
poke portb,1 ‘Шаг 4
pause ti ‘Задержка
goto check ‘Переход на проверку состояния кнопок
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Создаем робота-андроида своими руками»
Представляем Вашему вниманию похожие книги на «Создаем робота-андроида своими руками» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Создаем робота-андроида своими руками» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.