Джон Ловин - Создаем робота-андроида своими руками
Здесь есть возможность читать онлайн «Джон Ловин - Создаем робота-андроида своими руками» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2007, ISBN: 2007, Издательство: Array Литагент «ДМК», Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Создаем робота-андроида своими руками
- Автор:
- Издательство:Array Литагент «ДМК»
- Жанр:
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Создаем робота-андроида своими руками: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Создаем робота-андроида своими руками»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Создаем робота-андроида своими руками», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
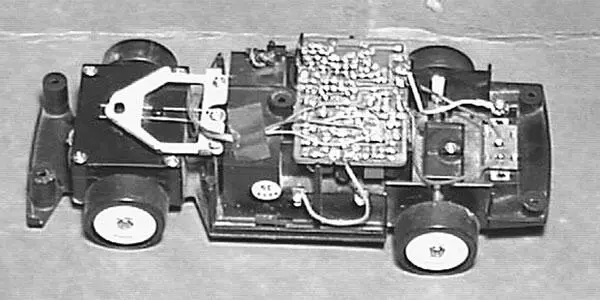
Рис. 10.1. Небольшая модель радиоуправляемого автомобиля не подходит для переделки

Рис. 10.2. Большая модель радиоуправляемого автомобиля подходит для переделки
Шаговые двигатели
B качестве ходовых двигателей платформы лучше всего использовать шаговые двигатели. Рассмотрим некоторые преимущества таких двигателей. Поскольку шаговый двигатель поворачивается на каждом шаге на строго определенный угол, микроконтроллер может легко подсчитать пройденный путь, зная количество импульсов управления, поданных на шаговый двигатель, и диаметр ведущего колеса. В случае применения на передвижной платформе двух шаговых двигателей, по одному на каждой стороне, используемых для прямого движения и поворота, оказываются возможными повороты на точный заранее определенный угол. Ввиду особой важности шаговых двигателей для робототехники, перед тем, как проектировать и изготовлять какие либо устройства, мы подробно остановимся на принципах их работы.
Конструкция и работа шагового двигателя
Шаговые двигатели сконструированы с использованием постоянных магнитов и электромагнитов. Постоянные магниты находятся на вращающемся валу, который называется ротором. Электромагниты или катушки обмоток находятся в неподвижной части двигателя и носят название статора. Рис. 10.3 иллюстрирует полный цикл работы шагового двигателя. Обмотки статора, неподвижной части двигателя, со всех сторон окружают ротор.
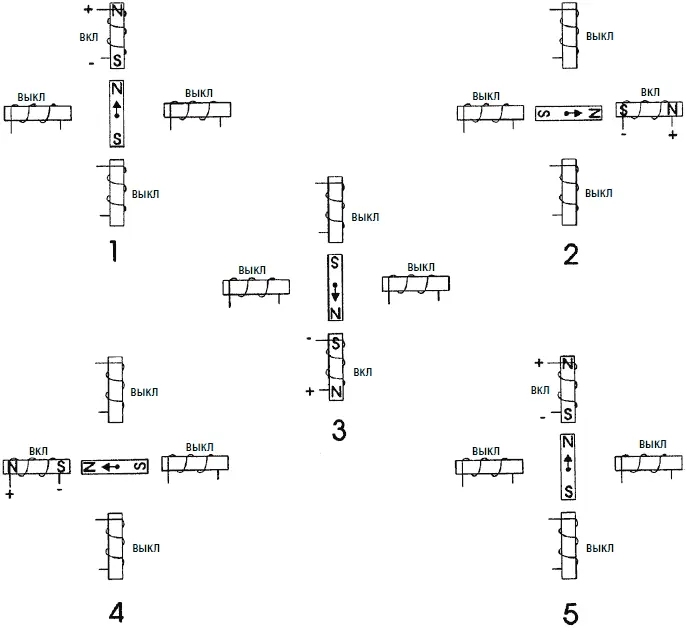
Рис 10.3. Полный шаг
На рис 10.3, позиция 1, ротор находится в начальном положении и направлен к верхнему электромагниту, который включен. Чтобы повернуть ротор по часовой стрелке, верхний электромагнит отключают и включают обмотку правого электромагнита. Это приводит к повороту ротора на 90° по часовой стрелке по направлению к правому электромагниту, как это показано в позиции 2. Продолжая таким же образом, ротор пошагово поворачивается до полного оборота, пока не окажется в начальной позиции, как это показано на позиции 5.
Разрешение
Угол поворота на каждый поступающий импульс называется разрешением шагового двигателя. В иллюстративном примере на рис. 10.3 ротор поворачивался на 90° на импульс – не очень подходяще для практического использования. Реальные шаговые двигатели имеют гораздо большее разрешение (меньшую угловую величину шага), например имеющие угол поворота 1° на импульс (или шаг). Для завершения полного оборота на такой двигатель необходимо подать 360 импульсов. Когда шаговый двигатель используется для передвижения или линейного позиционирования на поверхности, каждый шаг двигателя преобразуется в строго отмеренное линейное перемещение.
Допустим, что один оборот двигателя соответствует 25 мм линейного перемещения. Тогда приращение линейного перемещения для двигателя с разрешением 3,75° на шаг будет составлять примерно 0,25 мм на шаг. Для двигателя с разрешением 1° на шаг соответствующее приращение составит 0,007 мм на шаг. Соответственно, приращение линейного перемещения будет обратно пропорционально количеству градусов на один шаг.
Половинный шаг
Для некоторых типов шаговых двигателей возможно удвоить их разрешение с помощью процесса под названием половинный шаг. Этот процесс иллюстрирован рис. 10.4. В позиции I ротор начинает вращение с верхнего электромагнита, как это было ранее. В положении II включается правый электромагнит, при этом питание катушки верхнего электромагнита сохраняется. Поскольку ток протекает через катушки обоих электромагнитов, ротор притягивается к ним обоим и занимает промежуточное положение между двумя позициями (половина шага). В позиции III обмотка верхнего электромагнита обесточивается и ротор «завершает» полный шаг. Здесь показана только одна половина шага. Очевидно, что ротор может вращаться с половинным шагом в течение полного оборота.
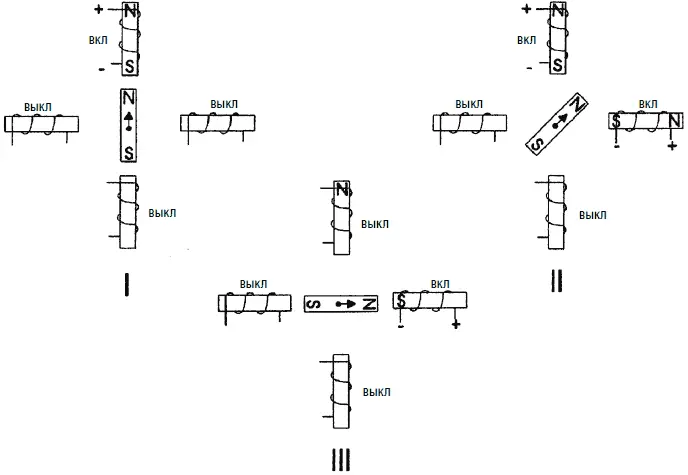
Рис. 10.4. Половинный шаг
Другие типы шаговых двигателей
Интервал:
Закладка:
Похожие книги на «Создаем робота-андроида своими руками»
Представляем Вашему вниманию похожие книги на «Создаем робота-андроида своими руками» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Создаем робота-андроида своими руками» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.