Джон Ловин - Создаем робота-андроида своими руками
Здесь есть возможность читать онлайн «Джон Ловин - Создаем робота-андроида своими руками» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2007, ISBN: 2007, Издательство: Array Литагент «ДМК», Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Создаем робота-андроида своими руками
- Автор:
- Издательство:Array Литагент «ДМК»
- Жанр:
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Создаем робота-андроида своими руками: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Создаем робота-андроида своими руками»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Создаем робота-андроида своими руками», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
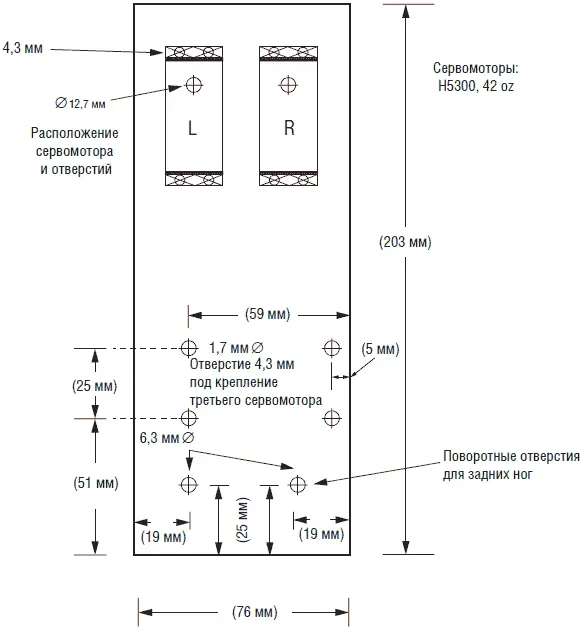
Рис. 11.7. Основание «тела»
Для разметки центров отверстий под сверление необходимо использовать кернер. В противном случае при сверлении отверстий сверло может «увести». Если у вас нет кернера, вы можете использовать в качестве неплохой замены острый гвоздь.
Ноги робота изготовлены из алюминиевой полосы шириной 12 мм и толщиной 3 мм (см. рис. 11.8). В передних ногах просверливается по четыре отверстия. В задних ногах сверлятся два отверстия: одно для подвижного крепления, а другое – для крепления тяги. Обратите внимание, что задние ноги на 6 мм короче передних. Это объясняется тем, что необходимо учитывать высоту фланца сервомотора, к которому крепятся передние ноги, над общим уровнем пластины. Укорочение задних ног выравнивает положение платформы.
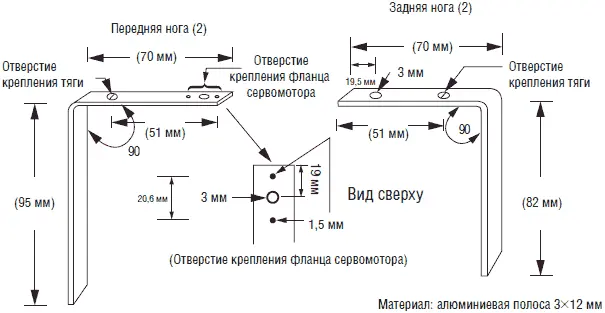
Рис. 11.8. Конструкция передних и задних ног
После сверления необходимых отверстий необходимо согнуть алюминиевую полосу по нужной форме. Зажмите полосу в тиски со стороны высверленных отверстий на расстоянии 70 мм. Нажмите на пластину и согните ее под углом 90°. Лучше всего нажимать на пластину непосредственно около губок тисков. При этом пластина согнется под углом 90° без риска выгибания самой «нижней» части ноги.
Центральные ноги выполнены из одного куска алюминия (см. рис. 11.9). При креплении к роботу центральные ноги оказываются на 3 мм короче передних и задних ног. Таким образом, в среднем положении они не касаются земли. Эти ноги предназначены для наклона робота вправо и влево. При вращении центрального сервомотора ноги наклоняют робота на угол примерно ±20°.
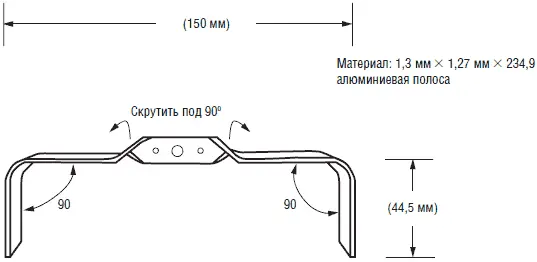
Рис. 11.9. Средние ноги
При изготовлении центральных ног в алюминиевой полосе размером 3х12х235 мм сверлятся сперва три центральных отверстия под фланец сервомотора. Затем алюминиевая полоса крепится в тиски, причем губки тисков по верхнему краю должны фиксировать полосу на расстоянии 20 мм от центра полосы. Зажмите полосу с помощью плоскогубцев на расстоянии примерно 12 мм от верхнего края тисков. Сохраняя зажим плоскогубцев, аккуратно скрутите алюминиевую полосу на угол 90°. Производите операцию достаточно медленно, иначе можно легко сломать пластину. Аналогично скрутите пластину с другой стороны.
После того как скручивание на 90° произведено, дополнительно согните пластину в двух местах на 90°, как мы это делали для передних и задних ног.
Установка сервомоторов
Передние сервомоторы крепятся к алюминиевому основанию с помощью пластиковых винтов и гаек 3 мм. Я выбрал пластиковые винты, поскольку их можно слегка гнуть и компенсировать небольшие несоответствия положений просверленных в пластине отверстий и крепежных отверстий сервомотора.
Ноги крепятся к пластиковому фланцу сервомотора. Для этого я использовал 2 миллиметровые винты и гайки. При креплении фланца к валу сервомотора убедитесь, что каждая нога может отклоняться вперед-назад на одинаковый угол от среднего перпендикулярного положения.
Конструкция тяги
Тяга между передними и задними ногами изготовлена из прутка с резьбой 3 мм (см. рис. 11.10). В исходной конструкции длина тяги составляет 132 мм от центра до центра. Тяга вставляется в отверстия на передней и задней ноге робота и может быть закреплена с помощью нескольких гаек.
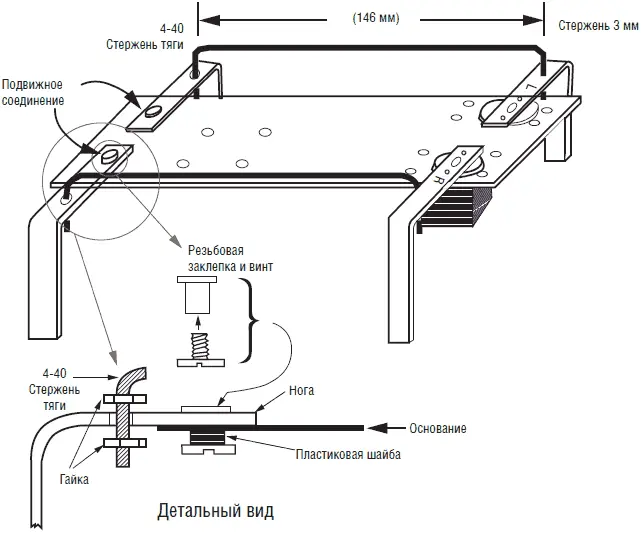
Рис. 11.10. Детальный чертеж шарнира и тяги
Перед установкой тяги задние ноги робота должны быть прикреплены к основанию. Крепление задних ног изготовлено из резьбовой заклепки 9,5 мм и крепежного винта. Детальное крепление ноги показано на рис. 11.10. Необходимо подложить пластиковые шайбы под основание, которые заполнят пространство между нижней частью основания и головкой винта. Такая конструкция обеспечивает крепление ноги к основанию без ее «болтания». Чтобы уменьшить трение, можно использовать пластиковые шайбы. Не используйте слишком много шайб – это приведет к излишнему прижиму ноги к поверхности основания. Нога должна поворачиваться в соединении достаточно свободно. На рис. 11.11 и 11.12 приведены фотографии частично собранного шестиногого робота.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Создаем робота-андроида своими руками»
Представляем Вашему вниманию похожие книги на «Создаем робота-андроида своими руками» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Создаем робота-андроида своими руками» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.