Роман Зыков - Роман с Data Science. Как монетизировать большие данные [litres]
Здесь есть возможность читать онлайн «Роман Зыков - Роман с Data Science. Как монетизировать большие данные [litres]» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2021, ISBN: 2021, Издательство: Издательство Питер, Жанр: Базы данных, popular_business, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
![Роман Зыков Роман с Data Science. Как монетизировать большие данные [litres] обложка книги](/books/438007/roman-zykov-roman-s-data-science-kak-monetizirova.webp)
- Название:Роман с Data Science. Как монетизировать большие данные [litres]
- Автор:
- Издательство:Издательство Питер
- Жанр:
- Год:2021
- Город:Санкт-Петербург
- ISBN:978-5-4461-1879-3
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Роман с Data Science. Как монетизировать большие данные [litres]: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Роман с Data Science. Как монетизировать большие данные [litres]»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Эта книга предназначена для думающих читателей, которые хотят попробовать свои силы в области анализа данных и создавать сервисы на их основе. Она будет вам полезна, если вы менеджер, который хочет ставить задачи аналитике и управлять ею. Если вы инвестор, с ней вам будет легче понять потенциал стартапа. Те, кто «пилит» свой стартап, найдут здесь рекомендации, как выбрать подходящие технологии и набрать команду. А начинающим специалистам книга поможет расширить кругозор и начать применять практики, о которых они раньше не задумывались, и это выделит их среди профессионалов такой непростой и изменчивой области. Книга не содержит примеров программного кода, в ней почти нет математики.
В формате PDF A4 сохранен издательский макет.
Роман с Data Science. Как монетизировать большие данные [litres] — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Роман с Data Science. Как монетизировать большие данные [litres]», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Есть еще ряд популярных метрик, таких как RMSE, MAE, R2.
Для задач классификации самые популярные метрики можно легко получить из матрицы ошибок классификации (misclassification или confusion matrix). Когда я собеседую кандидата на должность аналитика, то часто прошу нарисовать эту матрицу (табл. 8.2) и вывести из нее метрики.
Представьте, что вам нужно решить задачу классификации – определить, простужен человек или нет. У вас есть датасет со следующими фичами: температура тела, болит ли горло, есть ли насморк, чихание, светобоязнь. Для каждого примера у вас есть идентификатор: 1, или True, – человек болен простудой, 0, или False, – нет. Вы строите модель, которая для каждого примера дает результат: 1 для больного, 0 для здорового. Чтобы понять ошибку вашей модели, нужно сравнить ее вывод и правильные значения. Допустим, мы это сделали и теперь можем составить такую матрицу ошибок классификации. В строках мы отметим предсказанные значения, в столбцах – действительные. В ячейках таблицы можем написать количество случаев для каждого класса (0 и 1) – когда прогноз совпал, а когда нет. Я заполнил таблицу, к примеру, 100 примеров, когда мы верно угадали единицу.
Таблица 8.2. Матрица ошибок классификации
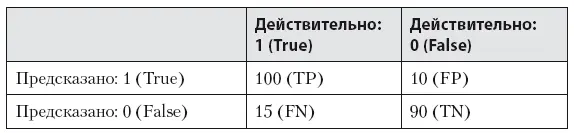
В скобках написаны обозначения, которые нам пригодятся для вывода метрик: TP = True Positive (правильно угаданные 1), TN = True Negative (правильно угаданные 0), FN = False Negative (ложно негативные, модель посчитала 0, а на самом деле 1), FP = False Positive (модель посчитала 1, а на деле 0). Давайте выведем метрики:
Accuracy (Точность) = точно угаданные / число примеров =
= (TP + TN) / (TP + TN + FP + FN).
Precision (Точность для 1) = TP / (TP + FP).
Recall (Полнота) = TP / (TP + FN) (или сколько процентов 1 мы нашли правильно).
F мера = 1 / (1/Precision + 1/Recall).
Самые часто применяющиеся метрики для классификации – precision и recall. Они не зависят от несбалансированности классов, как accuracy. Эта ситуация возникает, когда соотношение единиц и нулей в датасете далеко от 50/50.
В метриках классификации есть еще одна интересная – AUC-ROC (Area Under Curve of Receiver Operating Characteristic). Она нужна тогда, когда алгоритм классификации выдает вероятность принадлежности к какому-либо классу – 0 или 1. Чтобы посчитать метрики Recall и Precision, нам придется делать разные пороговые значения для вероятностей (чтобы различать классы) и считать их. Как раз для этого и нужна AUC-ROC, которая хорошо показывает эффективность классификатора независимо от порогового значения. Чтобы ее построить, необходимо взять набор пороговых значений из отрезка [8–0;1] и для каждого значения порога вычислить два числа:
TPR (True Positive Rate) = TP/(TP + FN) и
FPR (False Positive Rate) = FP/(FP + TN).
Отметить эти числа как точки в плоскости координат TPR и FPR и получить следующую кривую (рис. 8.3).
Площадь под ней и есть AUC. В случае если вы получаете AUC близкий к 0.5, ваш классификатор почти ничем не отличается от
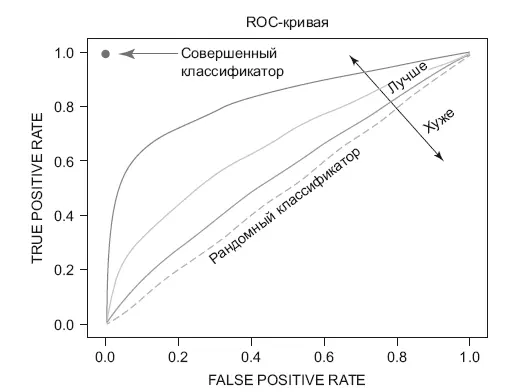
Рис. 8.3.ROC-кривая
случайного подбрасывания монетки. Чем его значение ближе к 1, тем лучше. Этот показатель часто используется в научной литературе и соревнованиях Kaggle.
Для других задач, например для ранжирования результатов поиска и для рекомендаций, используются свои показатели качества работы, о них можно узнать в специальной литературе.
Итак, у нас есть метрика. Теперь с ее помощью мы сможем сравнивать разные модели друг с другом и понимать, какая из них лучше. Можно приступать к обучению.
ML изнутри
Практически любая ML-модель для обучения с учителем сводится к двум вещам: определение функции потерь (loss function для одного примера, cost function для множества примеров) и процедуры ее минимизации.
Например, для линейной регрессии это будет среднеквадратичная ошибка в том виде, в каком мы определили ее ранее. Чтобы найти минимум функции потерь, существуют различные процедуры оптимизации. Одна из них называется градиентным спуском (Gradient Descent), она широко применяется на практике.
Как правило, оптимизация выглядит следующим образом:
1. Коэффициенты (которые нужно подобрать) модели инициализируются нулями или случайно.
2. Вычисляется величина функции потерь (например, среднеквадратичное отклонение) и ее градиент (производная от функции потерь). Градиент нам нужен, чтобы понять, куда двигаться для минимизации ошибки.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Роман с Data Science. Как монетизировать большие данные [litres]»
Представляем Вашему вниманию похожие книги на «Роман с Data Science. Как монетизировать большие данные [litres]» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.










Обсуждение, отзывы о книге «Роман с Data Science. Как монетизировать большие данные [litres]» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.