Feynmann - Feynmann 9
Здесь есть возможность читать онлайн «Feynmann - Feynmann 9» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: Старинная литература, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Feynmann 9
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Feynmann 9: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Feynmann 9»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Feynmann 9 — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Feynmann 9», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
<���протон летит по + z ', спин по + z '| H |L, спин по +z>. (15.42)
По общим теоремам квантовой механики эту амплитуду можно записать так:
2S<���протон летит по + z', спин по +z'|H|L, i > i |L, спин по +z>,
(15.43)
где суммирование проводится но базисным состояниям |L, i > покоящейся L-частицы. Поскольку спин L-частнцы равен 1/ 2, таких состояний два, л каком бы базисе мы ни работали. Если в качестве базисных мы выберем состояния со спином, направленным вверх и вниз по отношению к оси z'(|+z'>, |-z'>), то амплитуда (15.43) будет равна сумме
<���протон летит по +z', спин по +z'| H |L, +z'> + +<���протон летит по +z', спин по +z'| H |L,-z'>. (15.44).
Первый множитель в первом слагаемом равен а [из (15.38)], а первый множитель во втором слагаемом равен нулю — из формулы (15.41), в свою очередь следующей из сохранения момента количества движения. Второй множитель из первого слагаемого — это как раз амплитуда того, что частица со спином 1/ 2, направленным вверх по одной оси, будет также обладать спином, направленным вверх по другой оси, повернутой относительно первой на угол q . Такая амплитуда равна cosq/2 [см. табл. 4.2 (вып. 8)]. Так что (15.44) равно просто а созq/2, как и было написано в (15.33). Амплитуда (15.34) следует из таких же рассуждений для L-частицы со спином, направленным вниз.
· · ·
§ 6. Сводка матриц поворота
Теперь мы хотим собрать воедино все, что мы узнали о поворотах частиц со спином 1/ 2и спином 1; это будет удобно для дальнейшего. Ниже вы найдете таблицы двух матриц поворота R z (j) и R y (q) для частиц со спином 1/ 2, для частиц со спином 1 и для фотонов (частиц со спином 1 и нулевой массой).
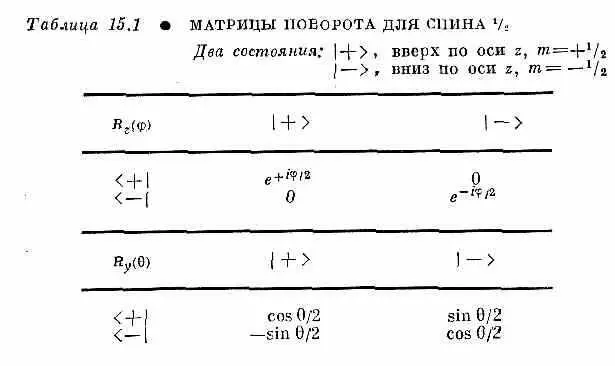
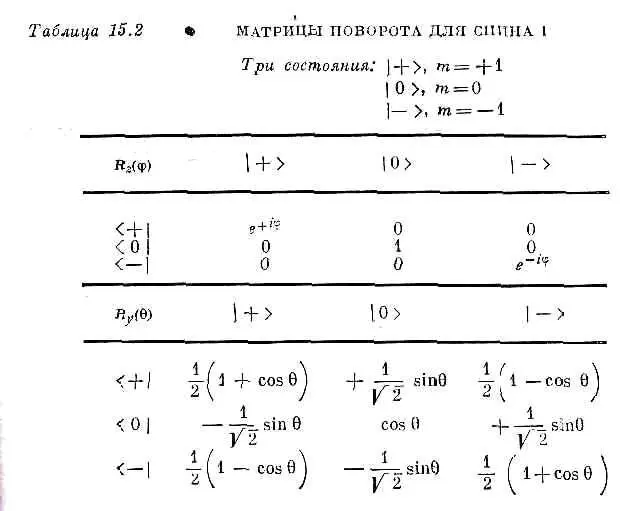
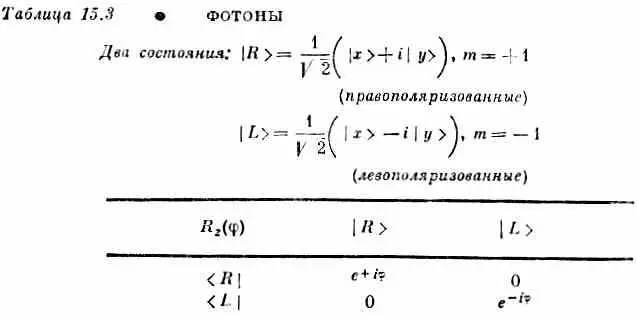
Для каждого из них приведены элементы матрицы < j | R | i > поворотов вокруг оси 2 или оси y . Они, конечно, в точности эквивалентны амплитудам типа <+ Т |0 S >, которыми мы пользовались в предыдущих главах. Под R z (j) мы понимаем, что берется проекция состояния на новую систему координат, повернутую на угол j вокруг оси z, причем для определения направления поворота всегда применяется правило правой руки; R V (q) означает, что оси координат повернуты на угол 9 вокруг оси у. Зная эти два поворота, вы запросто сможете рассчитать любой поворот. Как обычно, матричный элемент пишется так, что состояние слева — это базисное состояние новой (повернутой) системы, а состояние справа — это базисное состояние старой (неповернутой) системы. Клетки таблицы можно истолковывать по-разному. К примеру, клетка e i j /2 в табл. 15.1 означает, что матричный элемент < — | R | —> = е - i j /2. Но это означает также, что R ^ | — >=е - i j / 2| — } или что
<���— | R ^ = <���— |e - i j. Это все одно и то же.
* Вспомните, что спин — это аксиальный вектор и при отражении он переворачивается.
* Мы провели ось z ' в плоскости xz и используем матричные элементы для R y ( q ). То же получилось бы и при другом выборе осей.
* Мы сейчас предполагаем, что механизм квантовой механики вам настолько знаком, что обо всем можно говорить на чисто физическом языке, не тратя времени на расписывание всех математических деталей. Но если то, что мы здесь говорим, вам не очень ясно, то обратитесь к концу этого параграфа, где приведены некоторые недостающие детали.
* Мы попытались на худой конец доказать, что компонента момента количества движения вдоль направления движения у частицы с нулевой массой должна быть, например, кратной h /2, а не h /3. Но даже приведя в действие всевозможные свойства преобразований Лоренца (и многое другое), мы с этим не справились. Может, этой не так. Надо было бы потолковать об этом с профессором Вигнером, который знает все о таких вещах.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Feynmann 9»
Представляем Вашему вниманию похожие книги на «Feynmann 9» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.
Обсуждение, отзывы о книге «Feynmann 9» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.