Нихиль Будума - Основы глубокого обучения
Здесь есть возможность читать онлайн «Нихиль Будума - Основы глубокого обучения» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2020, ISBN: 2020, Издательство: Манн, Иванов и Фербер, Жанр: economics, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Основы глубокого обучения
- Автор:
- Издательство:Манн, Иванов и Фербер
- Жанр:
- Год:2020
- Город:Москва
- ISBN:9785001464723
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Основы глубокого обучения: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Основы глубокого обучения»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Основы глубокого обучения — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Основы глубокого обучения», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Проблема исчезающего градиента
Мотивы использования модели сети с фиксацией состояния связаны с идеей отражения долгосрочных зависимостей во входной последовательности. Вроде бы логично предположить, что РНС с большим банком памяти (рекуррентным слоем значительного размера) сможет запомнить все эти зависимости. И действительно, теоретически еще в 1996 году Джо Килиан и Хава Сигельманн показали, что РНС — универсальное функциональное представление [89]. Иными словами, при достаточном количестве нейронов и правильной настройке параметров РНС можно использовать для представления любых функциональных зависимостей между входными и выходными последовательностями. Эта теория много обещает, но на практике реализуется не всегда. Хоть и полезно знать, что РНС может выразить любую произвольную функцию, лучше понимать, насколько практически полезно с нуля обучать ее реалистическим функциональным связям путем применения алгоритмов градиентного спуска. Если это непрактично, мы окажемся в затруднительном положении, так что рассмотреть вопрос нужно максимально строго. Начнем с анализа самой простой РНС из возможных (рис. 7.16): один входной нейрон, один выходной, полносвязный рекуррентный слой тоже с одним нейроном.
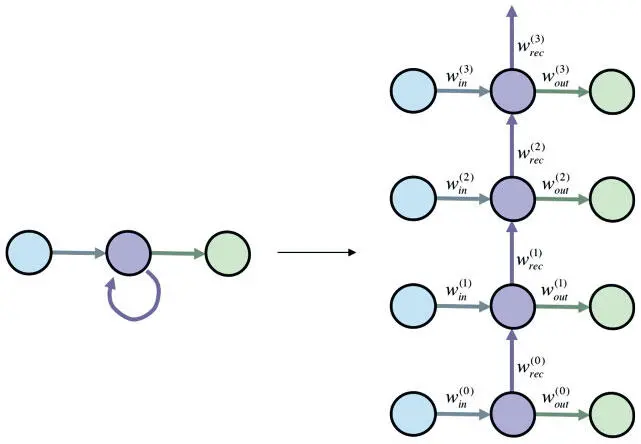
Рис. 7.16. Один нейрон в полносвязном рекуррентном слое (в сжатом и развернутом во времени видах) — пример анализа обучающих алгоритмов на основе градиента
Начнем с простого. При нелинейности f мы можем выразить активацию h (t) скрытого нейрона рекуррентного слоя на шаге t следующим образом, где i (t) — входной логит входного нейрона на временном шаге t :

Попытаемся вычислить, как активация скрытого нейрона будет меняться в ответ на корректировки входящего логита в течение k шагов в прошлом. Анализ этого компонента градиентных выражений обратного распространения ошибок начнем с оценки того, сколько «памяти» сохраняется от предшествующих входных данных.
Сначала возьмем частную производную и применим правило дифференцирования сложной функции:

Поскольку значения весов входного и рекуррентного соединений не зависят от входного логита на временном шаге ( t − k), можно упростить выражение:

Поскольку нам интересна величина этой производной, можно взять абсолютное значение обеих сторон. Мы также знаем, что для всех обычных нелинейностей (гиперболического тангенса — tanh, логистической и ReLU) максимальное значение f ′ равно 1. Отсюда выводим следующее рекурсивное неравенство:
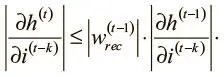
Можно продолжить рекурсивно расширять его, пока не дойдем до основного случая на шаге ( t − k):
Оценить эту частную производную можно уже рассмотренным путем:

В этом выражении активация скрытого слоя на шаге ( t − k − 1) не зависит от значения входных данных на шаге ( t − k).
Поэтому мы можем переписать его:

Наконец, взяв абсолютное значение для обеих сторон и вновь применив наблюдение относительно максимального значения f ′, можно записать:
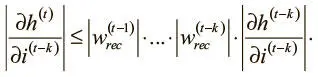
В результате получаем итоговое неравенство (которое можно упростить, поскольку мы хотим, чтобы связи на разных шагах имели одинаковые значения):

Это отношение устанавливает жесткую верхнюю границу того, как изменения во входных данных на шаге ( t − k) влияют на скрытое состояние на шаге t . Поскольку веса нашей модели в начале обучения невелики, значение этой производной с возрастанием k стремится к 0. Иными словами, градиент быстро уменьшается, когда он вычисляется по входным данным на несколько шагов назад, что существенно ограничивает способность модели к изучению долгосрочных зависимостей. Эта проблема обычно называется проблемой исчезающего градиента . Она серьезно влияет на способности обычных рекуррентных нейронных сетей к обучению. Наша задача — устранить эти ограничения, и в следующем разделе мы поговорим о чрезвычайно эффективном подходе к рекуррентным слоям, который именуется долгой краткосрочной памятью.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Основы глубокого обучения»
Представляем Вашему вниманию похожие книги на «Основы глубокого обучения» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Основы глубокого обучения» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.