Position, Navigation, and Timing Technologies in the 21st Century
Здесь есть возможность читать онлайн «Position, Navigation, and Timing Technologies in the 21st Century» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Position, Navigation, and Timing Technologies in the 21st Century
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Position, Navigation, and Timing Technologies in the 21st Century: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Position, Navigation, and Timing Technologies in the 21st Century»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Volume 1 of
contains three parts and focuses on the satellite navigation systems, technologies, and engineering and scientific applications. It starts with a historical perspective of GPS development and other related PNT development. Current global and regional navigation satellite systems (GNSS and RNSS), their inter-operability, signal quality monitoring, satellite orbit and time synchronization, and ground- and satellite-based augmentation systems are examined. Recent progresses in satellite navigation receiver technologies and challenges for operations in multipath-rich urban environment, in handling spoofing and interference, and in ensuring PNT integrity are addressed. A section on satellite navigation for engineering and scientific applications finishes off the volume.
Volume 2 of
consists of three parts and addresses PNT using alternative signals and sensors and integrated PNT technologies for consumer and commercial applications. It looks at PNT using various radio signals-of-opportunity, atomic clock, optical, laser, magnetic field, celestial, MEMS and inertial sensors, as well as the concept of navigation from Low-Earth Orbiting (LEO) satellites. GNSS-INS integration, neuroscience of navigation, and animal navigation are also covered. The volume finishes off with a collection of work on contemporary PNT applications such as survey and mobile mapping, precision agriculture, wearable systems, automated driving, train control, commercial unmanned aircraft systems, aviation, and navigation in the unique Arctic environment.
In addition, this text:
Serves as a complete reference and handbook for professionals and students interested in the broad range of PNT subjects Includes chapters that focus on the latest developments in GNSS and other navigation sensors, techniques, and applications Illustrates interconnecting relationships between various types of technologies in order to assure more protected, tough, and accurate PNT
will appeal to all industry professionals, researchers, and academics involved with the science, engineering, and applications of position, navigation, and timing technologies.pnt21book.com
Position, Navigation, and Timing Technologies in the 21st Century — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Position, Navigation, and Timing Technologies in the 21st Century», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
A typical BTS transmits into three different sectors within a particular cell. Ideally, all sectors’ clocks should be driven by the same oscillator, which implies that the same clock bias (after correcting for the PN offset) should be observed in all sectors of the same cell. However, factors such as the unknown separation between the phase centers of the sector antennas and delays due to RF connectors and other components (e.g. cabling, filters, amplifiers) cause the clock biases corresponding to different BTS sectors to be slightly different. This behavior was consistently observed experimentally in different locations, at different times, and for different cellular providers [18, 22]. In the following sections, a stochastic dynamic model for the observed clock bias mismatch for different sectors of the same BTS cell is derived.
38.7.1 Sector Clock Bias Mismatch Detection
In order to demonstrate the presence of the discrepancy between sectors’ clock biases, a cellular CDMA receiver was placed at the border of two sectors of the i ‐th BTS cell corresponding to the US cellular provider Verizon Wireless and was drawing pseudorange measurements from both sector antennas. The receiver had full knowledge of its state and of the BTS’s position. Subsequently, the receiver solved for the BTS clock biases  and
and  observed in sectors p iand q i, respectively. A realization of
observed in sectors p iand q i, respectively. A realization of  and
and  is depicted in Figure 38.54.
is depicted in Figure 38.54.
Figure 38.54suggests that the clock biases  and
and  can be related through
can be related through

where ɛ iis a random sequence that models the discrepancy between the sectors’ clock biases and
is the indicator function.
Note that the cdma2000 protocol requires all PN offsets to be synchronized to within 10 μs from GPS time; however, synchronization to within 3 μs is recommended [80]. Since each sector of a BTS uses a different PN offset, then the clock biases  and
and  will be bounded according to −10 μ s
will be bounded according to −10 μ s  and −10 μ s
and −10 μ s  . Therefore, ɛ iwill be within 20 μs from GPS time, namely
. Therefore, ɛ iwill be within 20 μs from GPS time, namely

The discrepancy  between the clock biases observed in two different sectors of some BTS cell over a 24 hour period is shown in Figures 38.55(a)–(b) for two different BTSs. Both BTSs pertained to the US cellular provider Verizon Wireless and are located near the University of California–Riverside campus. The cellular signals were recorded between September 23 and 24, 2016. It can be seen from Figure 38.55that ∣ɛ i∣ is bounded by approximately 2.02 μs and 0.65 μs, respectively, which is well below 20 μs. In the following subsection, a stochastic dynamic model for ɛ iis identified.
between the clock biases observed in two different sectors of some BTS cell over a 24 hour period is shown in Figures 38.55(a)–(b) for two different BTSs. Both BTSs pertained to the US cellular provider Verizon Wireless and are located near the University of California–Riverside campus. The cellular signals were recorded between September 23 and 24, 2016. It can be seen from Figure 38.55that ∣ɛ i∣ is bounded by approximately 2.02 μs and 0.65 μs, respectively, which is well below 20 μs. In the following subsection, a stochastic dynamic model for ɛ iis identified.
38.7.2 Sector Clock Bias Discrepancy Model Identification
The discrepancy  for p i≠ q iadheres to an autoregressive (AR) model of order n , which can be expressed as [81]
for p i≠ q iadheres to an autoregressive (AR) model of order n , which can be expressed as [81]
where ζ iis a white sequence. The objective is to find the order n and the coefficients  that will minimize the sum of the squared residuals
that will minimize the sum of the squared residuals  . To find the order n , several AR models were identified, and for a fixed order, a least‐squares estimator was used to solve for
. To find the order n , several AR models were identified, and for a fixed order, a least‐squares estimator was used to solve for  . It was noted that the sum of the squared residuals corresponding to each n ∈ {1, …, 10} were comparable, suggesting that the minimal realization of the AR model is of first order. For n = 1, it was found that a i, 1= − (1 − β i), where 0 < β i< < 1 (on the order of 8 × 10 −5to 3 × 10 −4). This implies that ɛ iis exponentially correlated with the continuous‐time dynamics given by
. It was noted that the sum of the squared residuals corresponding to each n ∈ {1, …, 10} were comparable, suggesting that the minimal realization of the AR model is of first order. For n = 1, it was found that a i, 1= − (1 − β i), where 0 < β i< < 1 (on the order of 8 × 10 −5to 3 × 10 −4). This implies that ɛ iis exponentially correlated with the continuous‐time dynamics given by
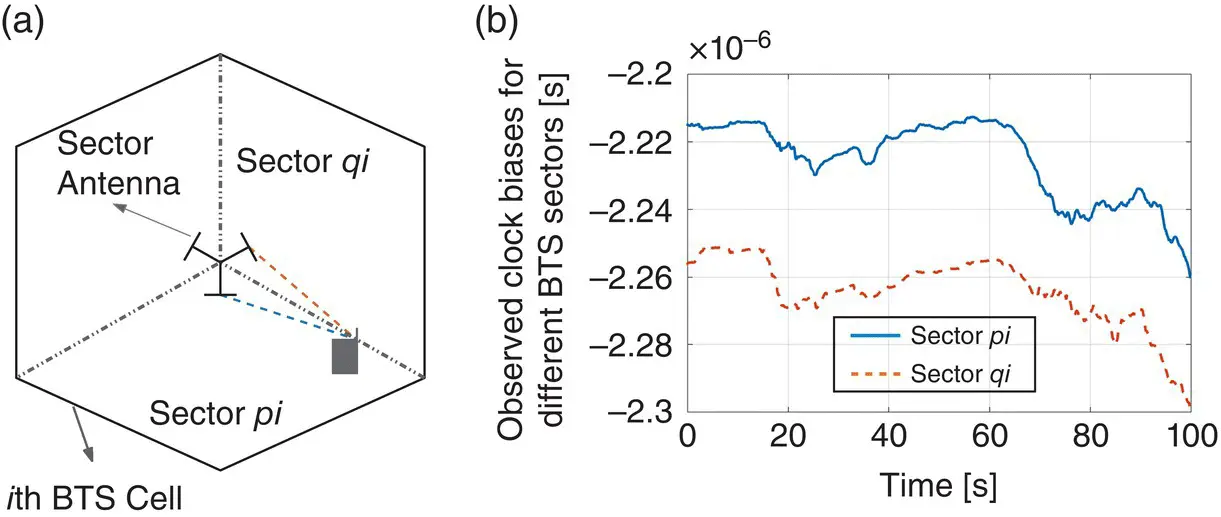
Figure 38.54 (a) A cellular CDMA receiver placed at the border of two sectors of a BTS cell, making pseudorange observations on both sector antennas simultaneously. The receiver has knowledge of its own states and has knowledge of the BTS position states. (b) Observed BTS clock bias corresponding to two different sectors from a real BTS (Khalife et al. [12, 18]; Khalife and Kassas [23, 25]).
Source: Reproduced with permission of IEEE.
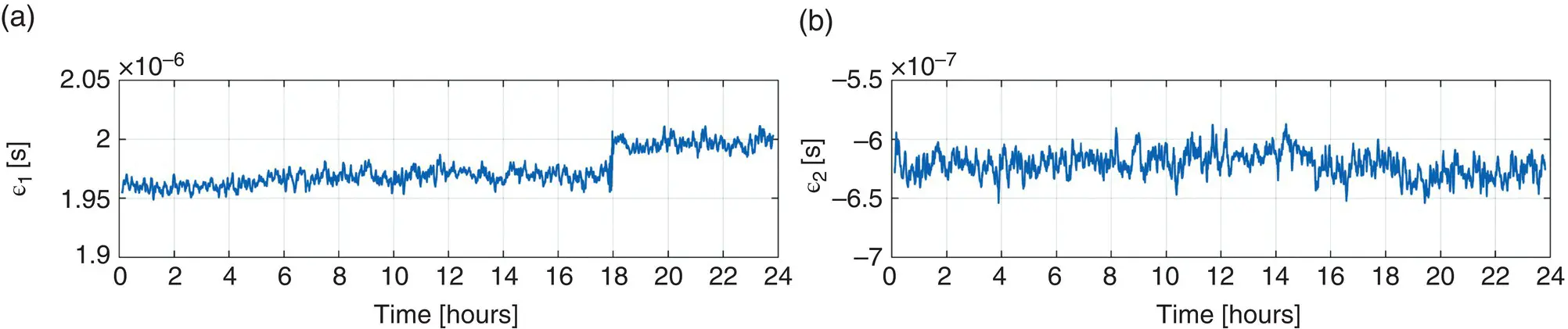
Figure 38.55 The discrepancies ɛ 1and ɛ 2between the clock biases observed in two different sectors of some BTS cell over a 24 hour period. (a) and (b) correspond to ɛ 1and ɛ 2for BTSs 1 and BTS 2, respectively. Both BTSs pertained to the US cellular provider Verizon Wireless and are located near the University of California–Riverside campus. The cellular signals were recorded between September 23 and 24, 2016. It can be seen that ∣ɛ i∣ is well below 20 μs (Khalife et al. [12]).
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century»
Представляем Вашему вниманию похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.











Обсуждение, отзывы о книге «Position, Navigation, and Timing Technologies in the 21st Century» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.