Position, Navigation, and Timing Technologies in the 21st Century
Здесь есть возможность читать онлайн «Position, Navigation, and Timing Technologies in the 21st Century» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Position, Navigation, and Timing Technologies in the 21st Century
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Position, Navigation, and Timing Technologies in the 21st Century: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Position, Navigation, and Timing Technologies in the 21st Century»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Volume 1 of
contains three parts and focuses on the satellite navigation systems, technologies, and engineering and scientific applications. It starts with a historical perspective of GPS development and other related PNT development. Current global and regional navigation satellite systems (GNSS and RNSS), their inter-operability, signal quality monitoring, satellite orbit and time synchronization, and ground- and satellite-based augmentation systems are examined. Recent progresses in satellite navigation receiver technologies and challenges for operations in multipath-rich urban environment, in handling spoofing and interference, and in ensuring PNT integrity are addressed. A section on satellite navigation for engineering and scientific applications finishes off the volume.
Volume 2 of
consists of three parts and addresses PNT using alternative signals and sensors and integrated PNT technologies for consumer and commercial applications. It looks at PNT using various radio signals-of-opportunity, atomic clock, optical, laser, magnetic field, celestial, MEMS and inertial sensors, as well as the concept of navigation from Low-Earth Orbiting (LEO) satellites. GNSS-INS integration, neuroscience of navigation, and animal navigation are also covered. The volume finishes off with a collection of work on contemporary PNT applications such as survey and mobile mapping, precision agriculture, wearable systems, automated driving, train control, commercial unmanned aircraft systems, aviation, and navigation in the unique Arctic environment.
In addition, this text:
Serves as a complete reference and handbook for professionals and students interested in the broad range of PNT subjects Includes chapters that focus on the latest developments in GNSS and other navigation sensors, techniques, and applications Illustrates interconnecting relationships between various types of technologies in order to assure more protected, tough, and accurate PNT
will appeal to all industry professionals, researchers, and academics involved with the science, engineering, and applications of position, navigation, and timing technologies.pnt21book.com
Position, Navigation, and Timing Technologies in the 21st Century — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Position, Navigation, and Timing Technologies in the 21st Century», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
A somewhat different technique from AoA that also exploits angular information was proposed in [36]. The system uses a fixed beacon composed of an active infrared (IR) light source and an optical polarizing filter, which only passes light through that oscillates along a single plane. The mobile receiver consists of a photo detector and a rotating polarizer that causes attenuation of the signal intensity depending on the horizontal angle. The phase of the time‐varying signal is then translated into the angle of the polarizing plane. This allows estimation of the absolute azimuth angle with an accuracy of 2% (or a few degrees).
37.5.1.2 Time‐Based Methods
ToA‐based localization solutions are based on the synchronization of the arrival time of a signal transmitted from a mobile subject (P) to at least three receiving beacons, as shown in Figure 37.3. The underlying idea is that the distance from the mobile subject to the beacons is directly proportional to the propagation time. This distance between the mobile subject and beacons is calculated based on one‐way propagation time measurements [37]. Several methods have been proposed for such measurements using DSSS [38] or UWB [39, 40]. In general, short‐pulse UWB waveforms permit accurate determination of the precise ToA and time of flight of a burst transmission from a short‐pulse transmitter to a corresponding receiver, which has been utilized in UWB‐based indoor localization solutions that can achieve very high indoor location accuracy (down to 20 cm in some cases) [41, 42]. But care needs to be taken in ToA systems so that that all transmitters and receivers in the system are precisely synchronized. Also, the transmitting signal must send a timestamp for the receiver to discern the distance the signal has traveled. The Active Bat positioning system [43] uses ultrasound signaling and ToA triangulation to measure the location of a tag carried by a person. The tag periodically broadcasts a short pulse of ultrasound that is received by a matrix of ceiling‐mounted receivers at known positions. The distances between the tag and the receivers can be measured by the ToA of the ultrasonic waves. The Hexamite system [44] also uses ToA triangulation‐based localization with ultrasound signaling. A hybrid ToA/AoA approach was introduced in [45]. By utilizing the information measured from AoA and ToA, the number of beacons (anchors) required can be reduced. In [46], another hybrid approach is proposed, in which a hybrid AoA/ToA scheme is used for localization if only one Wi‐Fi AP is available; however, if more APs are available, then a multiple‐message‐based AoA scheme is used to obtain higher accuracy location. This design aims to provide accurate localization even when the number of nearby anchors (Wi‐Fi APs) is limited.
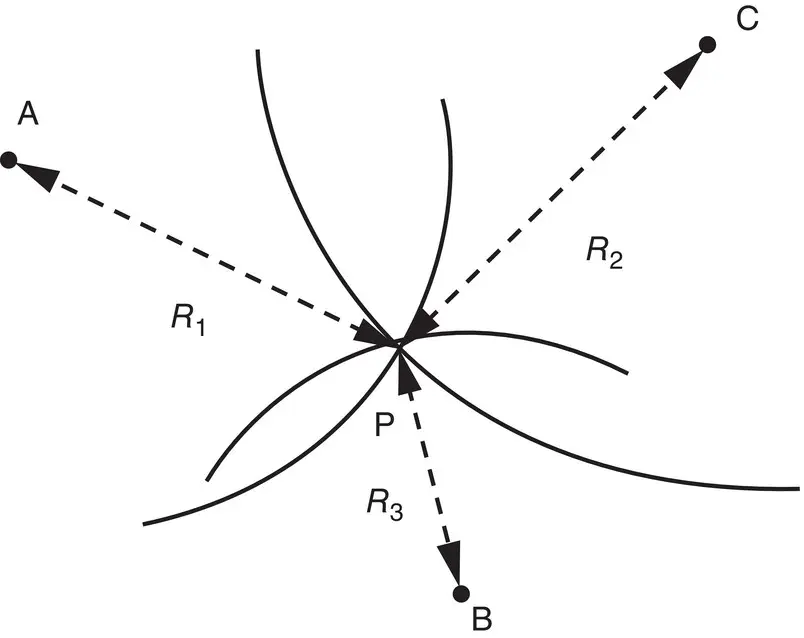
Figure 37.3 Positioning based on ToA/RToF measurements [27].
Source: Reproduced with permission of IEEE.
TDoA techniques determine the relative position of a mobile transmitter by analyzing the difference in time at which the signal arrives at multiple measuring units, rather than the absolute arrival time of ToA. A 2D target location can be estimated from the two intersections of two or more TDoA measurements, as shown in Figure 37.4. Two hyperbolas are formed from TDoA measurements at three fixed measuring units (A, B, C) to provide an intersection point and locate the subject P. The conventional methods for obtaining TDoA estimates are to use correlation techniques, for example, by the cross‐correlation between the signals received at a pair of measuring units. With TDoA, a transmission with an unknown starting time is received at various receiving nodes, with only the receivers requiring time synchronization [47]. TDoA does not need a synchronized time source of transmission in order to resolve timestamps and find the location. A delay‐measurement‐based TDoA estimation method was proposed in [38] for Wi‐Fi signals, which eliminates the requirement of initial synchronization in conventional methods. The TDoA between a UWB pulse arriving at multiple sensors has been used for high‐precision real‐time 3D location positioning [28]. Wi‐Fi‐based TDoA was proposed by [48], for indoor location estimation. The approach requires the same radio signal to be received at three or more separate points, timed very accurately (to a few nanoseconds) and processed using a TDoA algorithm to determine the location. A TDoA system with a proprietary RF signal (from the 2.4 GHz band) was proposed [49], with an emphasis on power efficiency. The approach used a dedicated standard protocol (ANSI 371.1) optimized for low‐power spread‐spectrum localization, which works by timing the signals transmitted from tags to a network of receivers.
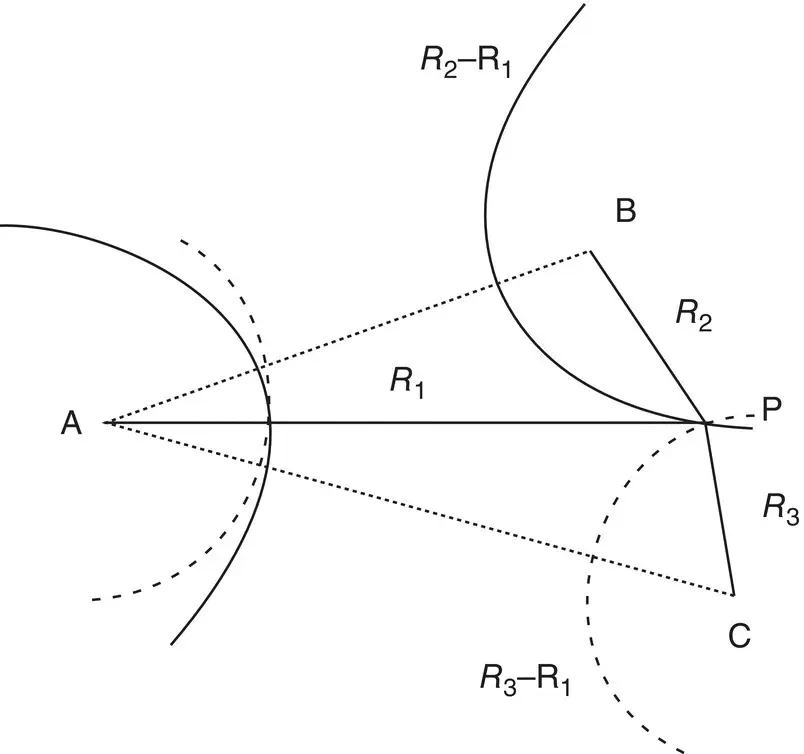
Figure 37.4 Positioning based on time difference of arrival (TDoA) [27].
Source: Reproduced with permission of IEEE.
RToF techniques measure the time of flight of a signal from the transmitter to the measuring unit and back. While ToA techniques calculate delay by using two local clocks in two different measuring nodes, RToF techniques use only one node to record the transmitting and arrival times. Thus, RToF techniques are less susceptible to synchronization problems than the other time‐based methods. An algorithm to measure the RToF of Wi‐Fi packets is presented in [9], with the results indicating measurement errors of a few meters. The positioning algorithms for ToA can often be directly applied in RToF techniques. Typically, the mobile subject responds to a received signal from the measuring units, and these measuring units calculate the RToF; however, it is difficult for the measuring unit to know the exact processing/response delay time at the mobile subject. Another challenge is that the measuring node may become overloaded when tracking multiple mobile subjects moving quickly. The 3D‐ID system [50] uses the RToF for distance estimation during localization. In the proposed approach, whenever a mobile tag receives a broadcast, the tag immediately rebroadcasts it on a different frequency, modulated with the tag’s ID. A cell controller cycles through the antennas, collecting a set of ranges to the tag. With a 40 MHz signal, this system was shown to achieve a 30 m range, 1 m precision, and 5 s location update rate.
It should be noted that radar (RAdio Detection And Ranging) systems exploit time‐based methods, such as the ones discussed above, for localization of an object. The original principle of radar was to measure the propagation time and direction of radio pulses transmitted by an antenna and then bounced back from a distant passive target. If the object returns some of the wave's energy to the antenna, the radar can measure the elapsed time (i.e. RToF) to estimate the distance, as well as the angle of incidence (by using a directional antenna). This original concept of radar assumes passive object reflection and involves only one station with both a transmitter and sensor. But in such systems, most of the signal energy gets lost due to reflection, and the use of steerable directional antennas is impracticable. Therefore, the concept of radar has been extended to include more than one active transmitter (secondary radar). Instead of passive reflection, the single‐way travel time of the radar pulse is measured by ToA and then returned actively. Frequency‐Modulated Continuous Wave (FMCW) radar is a short‐range localization technique, where the transmitter frequency is linearly increased with the time [1]. The returned echo is received with a constant offset, which relates to the distance traveled. An advantage of FMCW is its resistance to the Doppler effect. The Doppler movement introduces a shift in the frequency which is canceled out by differencing. Most FMCW radar implementations make use of multilateration based on RToF‐based distance estimates between a mobile transmitter and multiple fixed transponders. The transponder broadcasts a radio signal in the free ISM band (5.725 GHz to 5.875 GHz) which is received, processed, and echoed back to the transponder by each transmitter without time delay. The echo is coded with the respective transponder’s identification in order to allow the transmitter to separate each transponder´s answer. A localization system based on FMCW radar was proposed in [51] that consists of multiple fixed base stations and a lightweight mobile transponder operating at 5.8 GHz. Based on TDoA ranges at centimeter‐level precision measured under LOS conditions, a positioning accuracy of 10 cm over 500 m was shown to be achieved.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century»
Представляем Вашему вниманию похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.











Обсуждение, отзывы о книге «Position, Navigation, and Timing Technologies in the 21st Century» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.