Position, Navigation, and Timing Technologies in the 21st Century
Здесь есть возможность читать онлайн «Position, Navigation, and Timing Technologies in the 21st Century» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Position, Navigation, and Timing Technologies in the 21st Century
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Position, Navigation, and Timing Technologies in the 21st Century: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Position, Navigation, and Timing Technologies in the 21st Century»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Volume 1 of
contains three parts and focuses on the satellite navigation systems, technologies, and engineering and scientific applications. It starts with a historical perspective of GPS development and other related PNT development. Current global and regional navigation satellite systems (GNSS and RNSS), their inter-operability, signal quality monitoring, satellite orbit and time synchronization, and ground- and satellite-based augmentation systems are examined. Recent progresses in satellite navigation receiver technologies and challenges for operations in multipath-rich urban environment, in handling spoofing and interference, and in ensuring PNT integrity are addressed. A section on satellite navigation for engineering and scientific applications finishes off the volume.
Volume 2 of
consists of three parts and addresses PNT using alternative signals and sensors and integrated PNT technologies for consumer and commercial applications. It looks at PNT using various radio signals-of-opportunity, atomic clock, optical, laser, magnetic field, celestial, MEMS and inertial sensors, as well as the concept of navigation from Low-Earth Orbiting (LEO) satellites. GNSS-INS integration, neuroscience of navigation, and animal navigation are also covered. The volume finishes off with a collection of work on contemporary PNT applications such as survey and mobile mapping, precision agriculture, wearable systems, automated driving, train control, commercial unmanned aircraft systems, aviation, and navigation in the unique Arctic environment.
In addition, this text:
Serves as a complete reference and handbook for professionals and students interested in the broad range of PNT subjects Includes chapters that focus on the latest developments in GNSS and other navigation sensors, techniques, and applications Illustrates interconnecting relationships between various types of technologies in order to assure more protected, tough, and accurate PNT
will appeal to all industry professionals, researchers, and academics involved with the science, engineering, and applications of position, navigation, and timing technologies.pnt21book.com
Position, Navigation, and Timing Technologies in the 21st Century — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Position, Navigation, and Timing Technologies in the 21st Century», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
37.4.1 Infrared Radiation (IR) and Visible Light
Electromagnetic radiation at wavelengths within the visible range, which extends approximately between 380 and 750 nm, as well as in its lower or upper vicinity, known as ultraviolet (UV) and infrared (IR) light, are part of some of the most common indoor positioning systems that use wireless technology.
Visible light systems typically utilize general‐purpose cameras and have been adopted particularly for indoor localization of robots. One common approach is to have a robot carry a camera to capture images of the environment that can then be processed to infer location with respect to the environment [7]. Other approaches deploy cameras in fixed locations across the environment, and if the salient features of the object to be tracked appear in the field of view of the camera, the location of the object can be calculated with respect to the camera's fixed position [8]. A key challenge is how location can be estimated in a 3D world when the primary observations are 2D, from an image sensor. Depth information can be obtained by making use of the motion of a camera. In such an approach – known as synthetic stereo vision – the scene is observed sequentially from different locations by the same camera (or by multiple fixed coordinated cameras) and image depths can be estimated in a manner similar to the well‐known stereo‐vision approach. Alternatively, distances can be directly measured with additional sensors, such as with laser scanners or range imaging cameras. The latter returns a distance value for every pixel of an image at a specific frame rate.
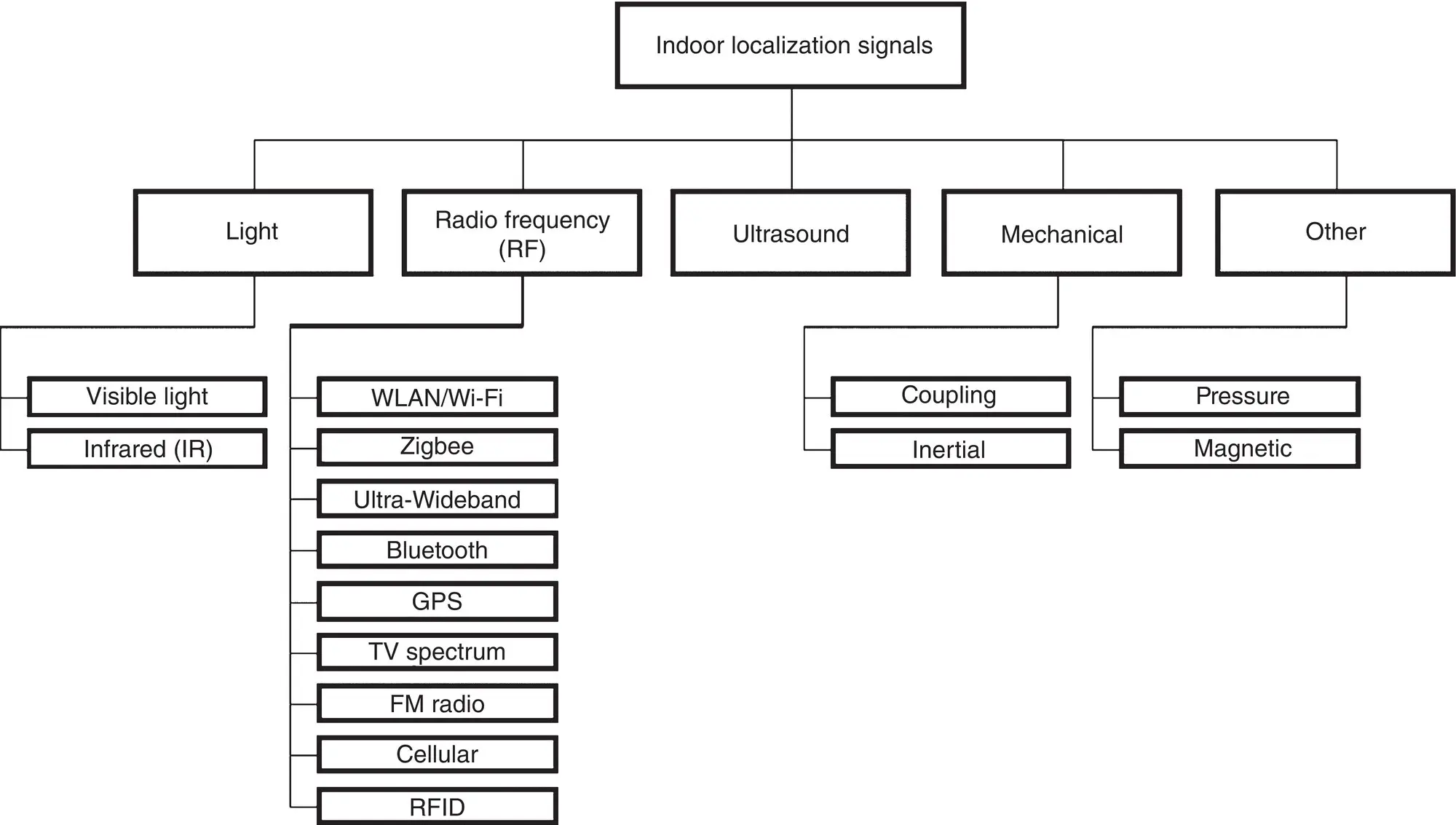
Figure 37.1 Taxonomy of signals for indoor localization.
All visible‐light‐based localization approaches require some form of image processing, which is time consuming and can be particularly error prone in some dynamic environments, for example, due to illumination variability [8]. In the case of laser based‐solutions, only class 1 laser devices should be used, which are classified as “eye‐safe” by the IEC 60825‐1 standard [9]. Another challenge arises due to occlusions caused by dynamic elements of the environment (e.g., moving objects or people). One way of reducing occlusion is to deploy sensors with overlapping coverage areas [8]. However, clinical settings and public indoor areas such as shopping malls are often densely populated, and therefore occlusion conditions can arise frequently even with ceiling‐mounted sensors.
IR‐based localization systems are also very popular, relying on a LOS communication mode between the transmitter and receiver. For instance, [10] presents an IR‐based localization system for museums with IR emitters installed in the ceiling of the door frames of every room. Each emitter transmits a unique ID using the Infrared Data Association (IrDA) protocol. Visitors carry a personal digital assistant (PDA) with an infrared port. The PDA contains a database of visual and textual information of the exhibits, as well as maps of the museum. Upon reception of a new ID, the PDA automatically presents the map of the corresponding exhibit hall. The main advantage of using IR‐based system devices is that they are small, lightweight, and easy to carry. However, IR‐based indoor positioning systems also have several limitations for location estimation, such as interference from fluorescent light, sunlight, as well as noise and reflections [11].
It is important to mention the privacy issues that may arise when using imaging‐based localization solutions. Typical solutions capture images of the environment, and thus can reveal important information about the person wearing the system or bystanders, for example, patients and health care personnel in the vicinity, in a hospital environment. This is particularly challenging because certain facilities (e.g., for health care) are required to protect the privacy of personnel, patients, and clients. The scenario becomes even more complex if image‐processing‐based mobile localization devices are designed to send captured images to central, computationally powerful servers for image processing. The confidentiality of the image is at great risk of being compromised while in transit over a network [12].
37.4.2 RF Signals
RF technologies [13] are commonly used in location position systems because radio waves can penetrate through obstacles such as building walls and human bodies easily. Moreover, they also enable a larger coverage area than other techniques. Localization solutions in this category estimate the location of a mobile user in the environment by measuring one or more properties of an electromagnetic wave radiated by a transmitter and received by a device carried by the mobile user. These properties typically depend on the distance traveled by the signal and the characteristics of the surrounding environment. RF localization systems can be categorized according to the underlying hardware technology and network type used: (i) personal and local area networks, and (ii) broadcast and wide area networks.
37.4.2.1 Personal and Local Area Networks
Personal and local area networks include technologies such as IEEE 802.11 (WLAN), Bluetooth, Zigbee, Ultra‐Wideband (UWB), and RFID.
WLAN APs are ubiquitous in indoor environments, where they are used to provide Wi‐Fi Internet services to users with a range of approximately 50–100 m per Wi‐Fi access point. Therefore, Wi‐Fi signals represent some of the most widely available RF signals in indoor environments. Not surprisingly, a majority of triangulation and fingerprint‐based indoor localization techniques (discussed in more detail in Section 37.5) utilize Wi‐Fi signals. The 802.11 Wi‐Fi family consists of several standards. The 802.11b and 802.11g standards use the 2.4 GHz industrial, scientific, and medical radio (ISM) radio band, and employ direct‐sequence spread spectrum (DSSS) and orthogonal frequency‐division multiplexing (OFDM) signaling methods to limit occasional interference from microwave ovens, cordless telephones, and Bluetooth devices. The 802.11a standard uses the 5 GHz U‐NII band, which for much of the world, offers at least 23 non‐overlapping channels rather than the 2.4 GHz ISM frequency band offering only 3 non‐overlapping channels, where other adjacent channels overlap. The 802.11n standard allows using either the 2.4 GHz or the 5 GHz band, while 802.11ac uses only the 5 GHz band. Note that as the segment of the RF spectrum used by 802.11 varies between countries, indoor localization solutions that utilize WLAN signals may need to be adjusted when deployed in different countries.
Bluetooth is a wireless standard for wireless personal area networks (WPANs), for exchanging data over short distances (using short‐wavelength RF waves in the ISM band from 2.4 to 2.485 GHz). Almost all Wi‐Fi‐enabled mobile devices available in the market today (e.g. smartphones, tablets, laptops) have an embedded Bluetooth module. Bluetooth has a smaller coverage area than Wi‐Fi (typically 10–20 m). In [14] it was shown that the Bluetooth Low Energy (BLE; Bluetooth 4.0) propagation model can better relate RSSI to range than Wi‐Fi, which indicates that BLE can be more accurate when used in localization scenarios. However, Wi‐Fi has a much wider coverage than BLE, so BLE‐based localization solutions will require more anchors/beacons compared to Wi‐Fi APs, for the same coverage area.
Zigbee is another short‐range wireless technology based on the IEEE 802.15.4 specification and mainly designed for applications which require low power consumption but do not require large data throughput. It operates in the 2.4 GHz ISM band in most jurisdictions worldwide, 784 MHz in China, 868 MHz in Europe, and 915 MHz in the United States and Australia. Zigbee implementations are typically more economical, more energy efficient, and have higher coverage (~100 m) than Bluetooth implementations. However, Zigbee support is less common in mobile devices than Bluetooth support. Moreover data rates for Zigbee vary from 20 kbit/s (868 MHz band) to 250 kbit/s (2.4 GHz band), which are much lower than the data rates achievable with Bluetooth (1–25 Mbit/s).
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century»
Представляем Вашему вниманию похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.











Обсуждение, отзывы о книге «Position, Navigation, and Timing Technologies in the 21st Century» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.