Position, Navigation, and Timing Technologies in the 21st Century
Здесь есть возможность читать онлайн «Position, Navigation, and Timing Technologies in the 21st Century» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Position, Navigation, and Timing Technologies in the 21st Century
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Position, Navigation, and Timing Technologies in the 21st Century: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Position, Navigation, and Timing Technologies in the 21st Century»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Volume 1 of
contains three parts and focuses on the satellite navigation systems, technologies, and engineering and scientific applications. It starts with a historical perspective of GPS development and other related PNT development. Current global and regional navigation satellite systems (GNSS and RNSS), their inter-operability, signal quality monitoring, satellite orbit and time synchronization, and ground- and satellite-based augmentation systems are examined. Recent progresses in satellite navigation receiver technologies and challenges for operations in multipath-rich urban environment, in handling spoofing and interference, and in ensuring PNT integrity are addressed. A section on satellite navigation for engineering and scientific applications finishes off the volume.
Volume 2 of
consists of three parts and addresses PNT using alternative signals and sensors and integrated PNT technologies for consumer and commercial applications. It looks at PNT using various radio signals-of-opportunity, atomic clock, optical, laser, magnetic field, celestial, MEMS and inertial sensors, as well as the concept of navigation from Low-Earth Orbiting (LEO) satellites. GNSS-INS integration, neuroscience of navigation, and animal navigation are also covered. The volume finishes off with a collection of work on contemporary PNT applications such as survey and mobile mapping, precision agriculture, wearable systems, automated driving, train control, commercial unmanned aircraft systems, aviation, and navigation in the unique Arctic environment.
In addition, this text:
Serves as a complete reference and handbook for professionals and students interested in the broad range of PNT subjects Includes chapters that focus on the latest developments in GNSS and other navigation sensors, techniques, and applications Illustrates interconnecting relationships between various types of technologies in order to assure more protected, tough, and accurate PNT
will appeal to all industry professionals, researchers, and academics involved with the science, engineering, and applications of position, navigation, and timing technologies.pnt21book.com
Position, Navigation, and Timing Technologies in the 21st Century — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Position, Navigation, and Timing Technologies in the 21st Century», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
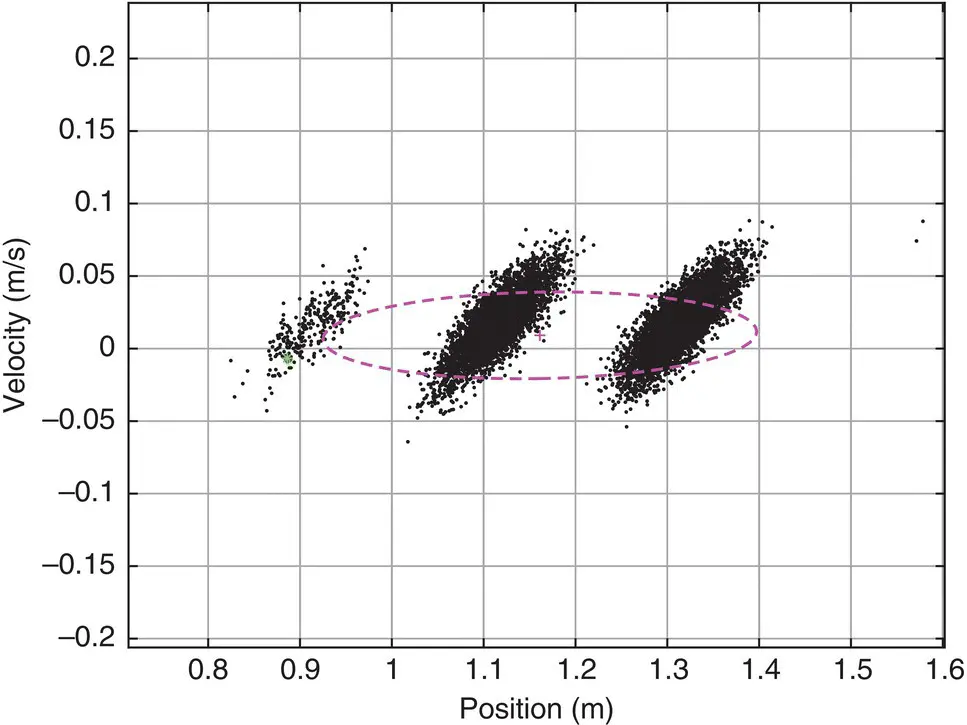
Figure 36.18 SIR particle filter state estimate (after 22 observations). Range observations combined with the vehicle dynamics model are eliminating unlikely integer ambiguity values.
The global state estimate and associated standard deviation result for this simulation is shown in Figure 36.20. The shape of the uncertainty bound clearly shows the effects described above. As the likelihood of each integer ambiguity realization changes, the overall uncertainty changes and eventually collapses to the centimeter level.
36.3.10 Strengths and Weaknesses of Approaches
In this chapter, we have presented three classes of nonlinear recursive estimation algorithms. While each algorithm offers improved performance over the linear and extended Kalman filter in the presence of nonlinearities and non‐Gaussian systems, it is important to address the “strengths and weaknesses” of each. To accomplish this, we evaluate each estimation from this perspective, starting with the traditional approaches.
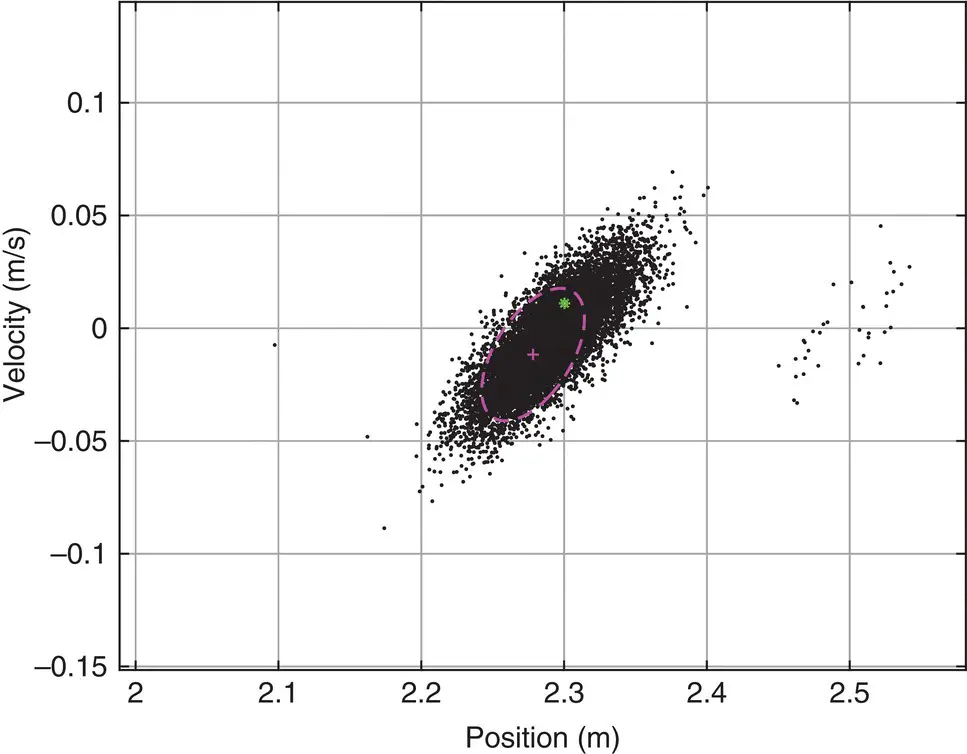
Figure 36.19 SIR particle filter state estimate (after 100 observations). Note that the state estimate is almost completely unimodal and has converged to the correct integer ambiguity.
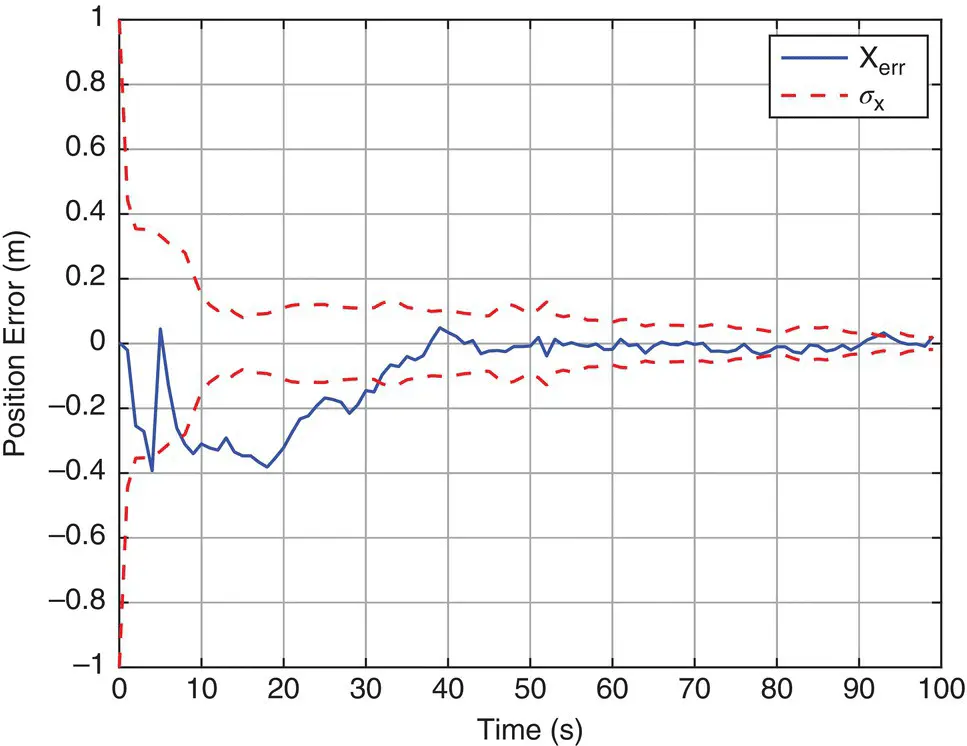
Figure 36.20 SIR particle filter position error and one‐sigma uncertainty. Note that the error uncertainty collapses once sufficient information is available to resolve the integer ambiguity.
As expected, each approach has a set of associated strengths and weaknesses that can greatly influence the results for a given problem. Thus, the choice of estimator must be considered carefully based on the characteristics of the problem at hand. In cases where the constraints of the problem do not readily fit into the generalized categories above, there are many examples of hybrid estimation schemes that seek to synergistically combine the desirable properties of multiple estimator types. While it is beyond the scope of this chapter to explore the range of hybrid filtering approaches, the interested reader is referred to the references (e.g. [4, 5, 6, 9, 10]) for foundational concepts.
36.4 Summary and Conclusions
In this chapter, we have presented an overview of nonlinear estimation approaches suitable for navigation problems. Starting with first principles, three classes of nonlinear, recursive estimators were derived, the performance was demonstrated using a common navigation example application, and comparisons were made between the approaches.
The growing availability of a wide range of sensors and improved computational resources has heralded a new era of multisensor navigation. Because many of these sensors have nonlinear and non‐Gaussian error models, researchers are developing a range of recursive navigation algorithms to meet these requirements.
When used within their associated limitations, nonlinear estimation algorithms hold enormous promise for addressing the most difficult navigation problems.
References
1 1 Kalman, R.E. (1960) A new approach to linear filtering and prediction problems. Transactions of the ASME–Journal of Basic Engineering, 82 (Series D), 35–45.
2 2 Maybeck, P.S. (1979) Stochastic Models, Estimation, and Control, Vol. I, Academic Press, Inc., Orlando, Florida 32887.
3 3 Maybeck, P.S. (1979) Stochastic Models, Estimation, and Control, Vol II, Academic Press, Inc., Orlando, Florida 32887.
4 4 Gordon, N.J., Salmond, D.J., and Smith, A.F. (1993) Novel approach to nonlinear/non‐Gaussian Bayesian state estimation, in IEE Proceedings F‐Radar and Signal Processing, vol. 140, IET, vol. 140, pp. 107–113.
5 5 Doucet, A., De Freitas, N., and Gordon, N. (2001) Sequential Monte Carlo Methods in Practice. Series Statistics for Engineering and Information Science.
6 6 Ristic, B., Arulampalam, S., and Gordon, N. (2004) Beyond the Kalman Filter: Particle Filters for Tracking Applications, Artech House.
7 7 Sheldon, S. and Maybeck, P. (1990) An optimizing design strategy for multiple model adaptive estimation and control, in Decision and Control, 1990, Proceedings of the 29th IEEE Conference on, pp. 3522–3527, Vol. 6.
8 8 Bar‐Shalom, Y., Li, X.R., and Kirubarajan, T. (2004) Estimation with Applications to Tracking and Navigation: Theory Algorithms and Software, John Wiley & Sons.
9 9 Doucet, A., de Freitas, N., Murphy, K., and Russell, S. (2000) Rao‐Blackwellised particle filtering for dynamic Bayesian networks, in Proceedings of the Sixteenth Conference on Uncertainty in Artificial Intelligence, Morgan Kaufmann Publishers Inc., San Francisco, California, UAI’00, pp. 176–183. URL http://dl.acm.org/citation.cfm?id=2073946.2073968.
10 10 Mustiere, F., Bolic, M., and Bouchard, M. (2006) Rao‐Blackwellised particle filters: Examples of applications, in Electrical and Computer Engineering, 2006. CCECE ‘06. Canadian Conference on, pp. 1196–1200.
11 11 Papoulis, A. and Pillai, S.U. (2002) Probability, Random Variables and Stochastic Processes, McGraw‐Hill, New York.
37 Overview of Indoor Navigation Techniques
Sudeep Pasricha
Colorado State University, United States
37.1 Introduction
While localization and navigation in outdoor environments can make use of global navigation satellite systems (GNSSs) such as Global Positioning System (GPS), this is not a viable solution for indoor localization because signals from GPS satellites are too weak to penetrate through buildings, obstacles, and into underground environments. Consequently, precise localization inside a closed structure, such as shopping malls, hospitals, airports, subways, and university campus buildings, require the use of alternative localization technologies. But indoor environments present unique challenges, particularly due to a diverse array of obstacles such as walls, doors, furniture, electronic equipment, and stationary or moving humans, all of which give rise to multipath effects in wireless signals due to signal reflection, attenuation, and noise interference. As a result, accurate indoor localization with wireless communication signals is a very complex problem. Moreover, indoor locales also require much higher levels of accuracy than outdoor environments; for example, while a 4–6 m accuracy is acceptable outdoors for vehicle navigation, it may not be acceptable for localization in many indoor contexts, where 4–6 m may be the difference between one room and the next.
Enabling location services for indoor locales has many potential applications. Buildings with awareness of the location of occupants can use this knowledge to optimize heating, lighting, and other resources toward saving energy costs. In emergency scenarios such as earthquakes and hurricanes, location services can allow emergency responders to determine where people are located at any time, potentially expediting evacuations as well as search and rescue efforts. Location awareness can be used as a backbone for smarter workplaces by allowing telephone calls to be routed to the nearest device in the proximity of a person, allowing colleagues to find each other, and helping guests navigate new buildings to reach their desired location. Services that utilize indoor location systems can also enable smart dynamic locking of sensitive rooms and resources if an owner is not present, to improve overall safety. Ubiquitous localization already plays a central role in social networking, for instance, to locate friends for coordinating joint activities or check into restaurants and other indoor locales via various smartphone apps, and is expected to play an even bigger role in the future. Indoor position awareness is also an essential component of industrial applications, such as for robot motion guidance, robot cooperation, and smart factories (e.g. the ability to find tagged maintenance tools and equipment scattered all over a plant in production facilities). Localization for cargo management systems at airports, ports, and for rail traffic enables unprecedented opportunities for increasing their efficiency.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century»
Представляем Вашему вниманию похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.











Обсуждение, отзывы о книге «Position, Navigation, and Timing Technologies in the 21st Century» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.