Position, Navigation, and Timing Technologies in the 21st Century
Здесь есть возможность читать онлайн «Position, Navigation, and Timing Technologies in the 21st Century» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Position, Navigation, and Timing Technologies in the 21st Century
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Position, Navigation, and Timing Technologies in the 21st Century: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Position, Navigation, and Timing Technologies in the 21st Century»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Volume 1 of
contains three parts and focuses on the satellite navigation systems, technologies, and engineering and scientific applications. It starts with a historical perspective of GPS development and other related PNT development. Current global and regional navigation satellite systems (GNSS and RNSS), their inter-operability, signal quality monitoring, satellite orbit and time synchronization, and ground- and satellite-based augmentation systems are examined. Recent progresses in satellite navigation receiver technologies and challenges for operations in multipath-rich urban environment, in handling spoofing and interference, and in ensuring PNT integrity are addressed. A section on satellite navigation for engineering and scientific applications finishes off the volume.
Volume 2 of
consists of three parts and addresses PNT using alternative signals and sensors and integrated PNT technologies for consumer and commercial applications. It looks at PNT using various radio signals-of-opportunity, atomic clock, optical, laser, magnetic field, celestial, MEMS and inertial sensors, as well as the concept of navigation from Low-Earth Orbiting (LEO) satellites. GNSS-INS integration, neuroscience of navigation, and animal navigation are also covered. The volume finishes off with a collection of work on contemporary PNT applications such as survey and mobile mapping, precision agriculture, wearable systems, automated driving, train control, commercial unmanned aircraft systems, aviation, and navigation in the unique Arctic environment.
In addition, this text:
Serves as a complete reference and handbook for professionals and students interested in the broad range of PNT subjects Includes chapters that focus on the latest developments in GNSS and other navigation sensors, techniques, and applications Illustrates interconnecting relationships between various types of technologies in order to assure more protected, tough, and accurate PNT
will appeal to all industry professionals, researchers, and academics involved with the science, engineering, and applications of position, navigation, and timing technologies.pnt21book.com
Position, Navigation, and Timing Technologies in the 21st Century — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Position, Navigation, and Timing Technologies in the 21st Century», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
37.4.4 Inertial and Mechanical
Whenever energy is exerted due to the mechanical movement of a moving subject, the energy can be measured and used for localization in indoor environments. As an example, a “Smart Floor” [23] was proposed with metallic plates that were instrumented with load cells, which used mechanical coupling between a moving person and the load cells. The plates were laid on the floor, and the signal captured via the load cell was processed in order to identify the person walking over a plate and the path they were taking. A more common example of exploiting mechanical energy for localization is via accelerometer (to measure acceleration) and gyroscope (to measure angular rotation) sensors. Such “inertial” sensors that are part of IMUs commonly found in smartphones can be used to estimate the trajectory of motion for a moving person or object, which can help with their localization in indoor environments [24]. In particular, such sensors are very useful to estimate the stride length and step counts for a person in motion, to determine their displacement over time. Techniques that use inertial sensors for localization are often referred to as “dead reckoning” techniques, as the location estimates provided by the sensors depend on previous measurements to estimate the absolute position or orientation of the object being tracked at any given instant. A challenge with using inertial measurements for localization is that the inertial sensors are susceptible to drift due to thermal changes in the circuitry of the sensors, calibration issues, and inherent noise [25].
37.4.5 Other Signals
There are a few other signals that can aid with indoor localization. Atmospheric pressure can be captured using barometric/altitude/pressure sensors, and used to provide estimates of the altitude of the person or object to be tracked. Magnetic readings captured by a (digital) compass can also be used for heading (direction) estimation. Most IMUs today include three perpendicular magnetometer sensors to measure the strength and/or direction of a magnetic field, along with traditional 3‐axis accelerometer sensors for motion estimation, and 3‐axis gyroscope sensors to measure angular rotation. However, spurious electromagnetic field disturbances can affect the readings of the magnetometer sensors when in proximity to metallic structures or radio‐wave‐emitting devices.
In general, the signals discussed above can help improve the accuracy of indoor localization when used in tandem with other more robust and comprehensive localization signals, for example, dead reckoning or RF‐signal‐based localization.
37.5 Indoor Localization Techniques
Having identified the commonly used signals for indoor localization, we now present a survey of various indoor localization techniques that have been proposed and evaluated to date. We classify these techniques in this section based on the measuring principles used: triangulation, fingerprinting, proximity, dead reckoning, map matching, and hybrid techniques. Typically, for all of these different types of techniques, there are two main approaches for deployment: (i) developing a custom signaling and network infrastructure, and (ii) reusing an existing network infrastructure (e.g. existing Wi‐Fi APs in a building). With the first approach, it is possible to control the physical specification and, consequently, the quality of the location sensing results; whereas the second approach has much lower costs as it avoids expensive and time‐consuming deployment of infrastructure [26].
37.5.1 Triangulation
Triangulation is a family of wireless radio‐signal‐based methods that use the geometric properties of triangles to determine location. The methods can be broadly classified as angulation‐based and lateration‐based [27]. Angulation locates an object by computing its angles relative to multiple fixed reference points. In contrast, lateration estimates the position of an object by measuring its distances from multiple reference points (the general term multilateration is often used whenever two or more reference points are used). As a proxy for directly using distance, some methods use the RSS, ToA or time difference of arrival (TDoA). In these methods, the distance is derived by computing the attenuation of the signal strength or by multiplying the radio signal velocity and the signal travel time. A few methods also use the round‐trip time of flight (RToF) or received signal phase for distance estimation. We describe the major triangulation‐based methods for indoor localization in the rest of this section.
37.5.1.1 Angle‐Based Methods
The angle of arrival (AoA) technique estimates the location of the desired target by analyzing the intersection of several pairs of angle direction lines, each formed by the circular radius from a base station or a beacon station to the mobile target. Figure 37.2shows how AoA methods may use at least two known reference points (A, B), and two measured angles ( θ 1 , θ 2) to derive the 2D location of the subject P . The actual estimation of AoA can be accomplished with directional antennas or an array of antennas. The AoA between a UWB pulse arriving at multiple sensors has been used for real‐time 3D location positioning in [28]. The advantages of the AoA approach are that a location estimate may be determined with just three measuring units for 3D positioning or two measuring units for 2D positioning, and that no time synchronization between measuring units is required [29]. The disadvantages are primarily due to the large and complex hardware needed (e.g. Quuppa’s HAIP system [30] uses AoA for indoor localization but requires a specific hardware device including 16 array antennas with a transmitter as nearby anchors and special tags for positioning), and location estimate degradation as the mobile subject moves farther from the measuring units [31]. The angle measurements need to be accurate for accurate positioning, but this is challenging with wireless signals due to limitations imposed by shadowing, multipath reflections arriving from misleading directions, or by the directivity of the measuring aperture [32].
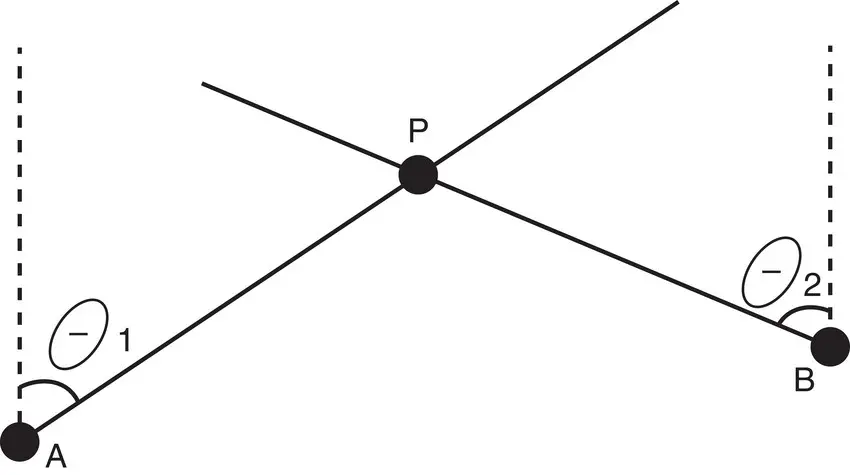
Figure 37.2 Positioning based on angle of arrival (AoA) measurement [27].
Source: Reproduced with permission of IEEE.
AoA‐based methods have been used in several light‐based localization solutions. PIXEL [33] is an indoor localization solution that uses AoA methods to determine localization and orientation of mobile devices. The system consists of beacons that periodically send out their identity via visible light communication, which are captured by the mobile devices, followed by AoA‐based post‐processing. Luxapose [34] also uses visible light and employs AoA techniques for indoor localization. In [35], an AoA‐based localization solution was proposed based on passive thermal IR sensors to detect thermal radiation of the human skin. The system is passive as it uses natural infrared radiation without any active IR signal emitters. The approach used thermophiles (a series of thermocouple‐based temperature sensor elements) with a lower resolution compared to IR cameras. Multiple sensors were placed in the corners of a room from where the angles relative to the radiation source were measured. The position of human subjects was then roughly estimated via the principle of AoA, using triangulation from multiple thermophile arrays. However, the effects of dynamic background radiation need to be carefully considered before the method is considered for use in real‐world environments.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century»
Представляем Вашему вниманию похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.











Обсуждение, отзывы о книге «Position, Navigation, and Timing Technologies in the 21st Century» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.