Position, Navigation, and Timing Technologies in the 21st Century
Здесь есть возможность читать онлайн «Position, Navigation, and Timing Technologies in the 21st Century» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Position, Navigation, and Timing Technologies in the 21st Century
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Position, Navigation, and Timing Technologies in the 21st Century: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Position, Navigation, and Timing Technologies in the 21st Century»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Volume 1 of
contains three parts and focuses on the satellite navigation systems, technologies, and engineering and scientific applications. It starts with a historical perspective of GPS development and other related PNT development. Current global and regional navigation satellite systems (GNSS and RNSS), their inter-operability, signal quality monitoring, satellite orbit and time synchronization, and ground- and satellite-based augmentation systems are examined. Recent progresses in satellite navigation receiver technologies and challenges for operations in multipath-rich urban environment, in handling spoofing and interference, and in ensuring PNT integrity are addressed. A section on satellite navigation for engineering and scientific applications finishes off the volume.
Volume 2 of
consists of three parts and addresses PNT using alternative signals and sensors and integrated PNT technologies for consumer and commercial applications. It looks at PNT using various radio signals-of-opportunity, atomic clock, optical, laser, magnetic field, celestial, MEMS and inertial sensors, as well as the concept of navigation from Low-Earth Orbiting (LEO) satellites. GNSS-INS integration, neuroscience of navigation, and animal navigation are also covered. The volume finishes off with a collection of work on contemporary PNT applications such as survey and mobile mapping, precision agriculture, wearable systems, automated driving, train control, commercial unmanned aircraft systems, aviation, and navigation in the unique Arctic environment.
In addition, this text:
Serves as a complete reference and handbook for professionals and students interested in the broad range of PNT subjects Includes chapters that focus on the latest developments in GNSS and other navigation sensors, techniques, and applications Illustrates interconnecting relationships between various types of technologies in order to assure more protected, tough, and accurate PNT
will appeal to all industry professionals, researchers, and academics involved with the science, engineering, and applications of position, navigation, and timing technologies.pnt21book.com
Position, Navigation, and Timing Technologies in the 21st Century — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Position, Navigation, and Timing Technologies in the 21st Century», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
An RFID system consists of RFID readers (scanners) and RFID tags. The RFID reader is able to read the data from RFID tags that are either passive or active. Passive RFID tags rely on inductive coupling and operate without a battery, reflecting the RF signal transmitted to them from a reader and adding information by modulating the reflected signal. Inductive coupling allows the passive tags to receive sufficient energy in the form of RF waves from the nearby RFID reader to perform signal modulation, to transfer their unique serial ID (or other information) back to the reader. But the range of passive RFID tags is very limited (1–2 m), and the cost of the readers is relatively high. Active RFID tags are small transceivers that can actively transmit their ID (or other additional data) in response to an interrogation. Systems based on active RFID use smaller antennas and have a much longer range (tens of meters). LANDMARC [103] utilizes active RFID‐based fixed location reference tags for proximity‐based indoor location calibration.
The Cell‐ID (or Cell‐of‐Origin) method is based on the principle of capturing the ID of an anchor node that is generating the RF signal with the highest RSSI, and then identifying the mobile subject’s position as having the same coordinates as the anchor node. For example, mobile cellular networks can identify the approximate position of a mobile handset by knowing which cell site the device is using at a given time. Wi‐Fi APs can also be used to obtain the ID of the AP with the highest RSSI and perform localization with respect to that AP. In general, the localization accuracy when using cell‐ID is quite low (50–200 m), depending on the cell size (or Wi‐Fi coverage). The accuracy is often higher in densely covered areas (e.g. urban places) and much lower in rural environments [104].
37.5.4 Dead Reckoning
Dead reckoning refers to the use of sensors that provide location updates, calculated based on the last determined position and incrementing that position based on known or estimated speeds over elapsed time. Position and speed estimation is typically based on IMUs, which include multi‐axis accelerometers, gyroscopes, and possibly magnetometers. A disadvantage of dead reckoning is that the inaccuracy of the estimation process is cumulative, so any deviations in the position estimates become larger with time. This is because new positions are calculated entirely from previous positions. Thus, these inertial navigation systems (INSs) are often used to estimate relative rather than absolute location, that is, the change in position since the last update, with some other localization technology (e.g. Wi‐Fi fingerprinting) for obtaining periodic position fixes (absolute location estimates).
The first task in an INS that is used for human localization is the identification of steps or strides from the sensor data. A step is the period between two footfalls on opposite feet, whereas a stride is the same quantity but between the same foot. At a minimum, there is a need for accurate step detection and step counting for most INS‐based indoor localization approaches. Step cycle detection algorithms detect cycles in the INS data caused by the repetitive motion of walking, which may involve searching for repeating data patterns or for repeating events (e.g. the heel strike). This information can be used for step detection and counting. Figure 37.6shows an example of extracting the cycle (and thus step counts) by seeking maxima in the mean‐adjusted autocorrelation of a sequence of accelerometer magnitude data [105]. Usually a low‐pass filter is used on the raw accelerometer data to remove noise as a pre‐processing step before the algorithm is used. Filter cutoff frequencies of around 20 Hz retain the step periodicity, although filtering down to 2 or 3 Hz has also been used successfully [106]. In general, the cyclic property of walking is directly reflected in the acceleration trace in the time domain. As heel strikes tend to introduce sharp changes, numerous schemes propose to detect magnitude peaks [107, 108], local variance peaks [109, 110], local minima [111, 112], zero crossings [113], or level crossings [114] (where levels are defined by historical mean and variance) from the low‐pass filtered acceleration trace.
Knowing the step count, it is possible to estimate displacement of a mobile subject if information related to the stride length is available. Pedestrians typically have a natural walking pace with a surprisingly constant stride length. However, this natural walking pace is altered when rushing, ambling, or walking with others. The stride length can vary by as much as 40% between pedestrians walking at the same speed, and up to 50% across the range of walking speeds of a pedestrian [106]. Direct measures involving additional sensors can help estimate the length with high accuracy (e.g. using ultrasonic sensors mounted on the front and back of each shoe [115], or electromyography sensors attached to the calf [116]), but such methods also come at high costs and inconvenience to the mobile user. Several studies in human kinematics correlate stride length with step frequency [117–119]. The major observation is that stride length tends to be shorter when walking slowly rather than fast [120]. A simple linear relationship often suffices [121], but the model parameters that are trained offline are specific to walking conditions, such as wearing sport shoes or high heels [122]. Techniques to detect locomotion modalities (e.g. walking or running) can help construct more elaborated motion models (e.g. adjust stride length estimation or step counting according to varying speeds), to improve localization accuracy. Utilizing accelerometers in smartphones to distinguish different locomotion modalities has been proposed in a few works [123–125].
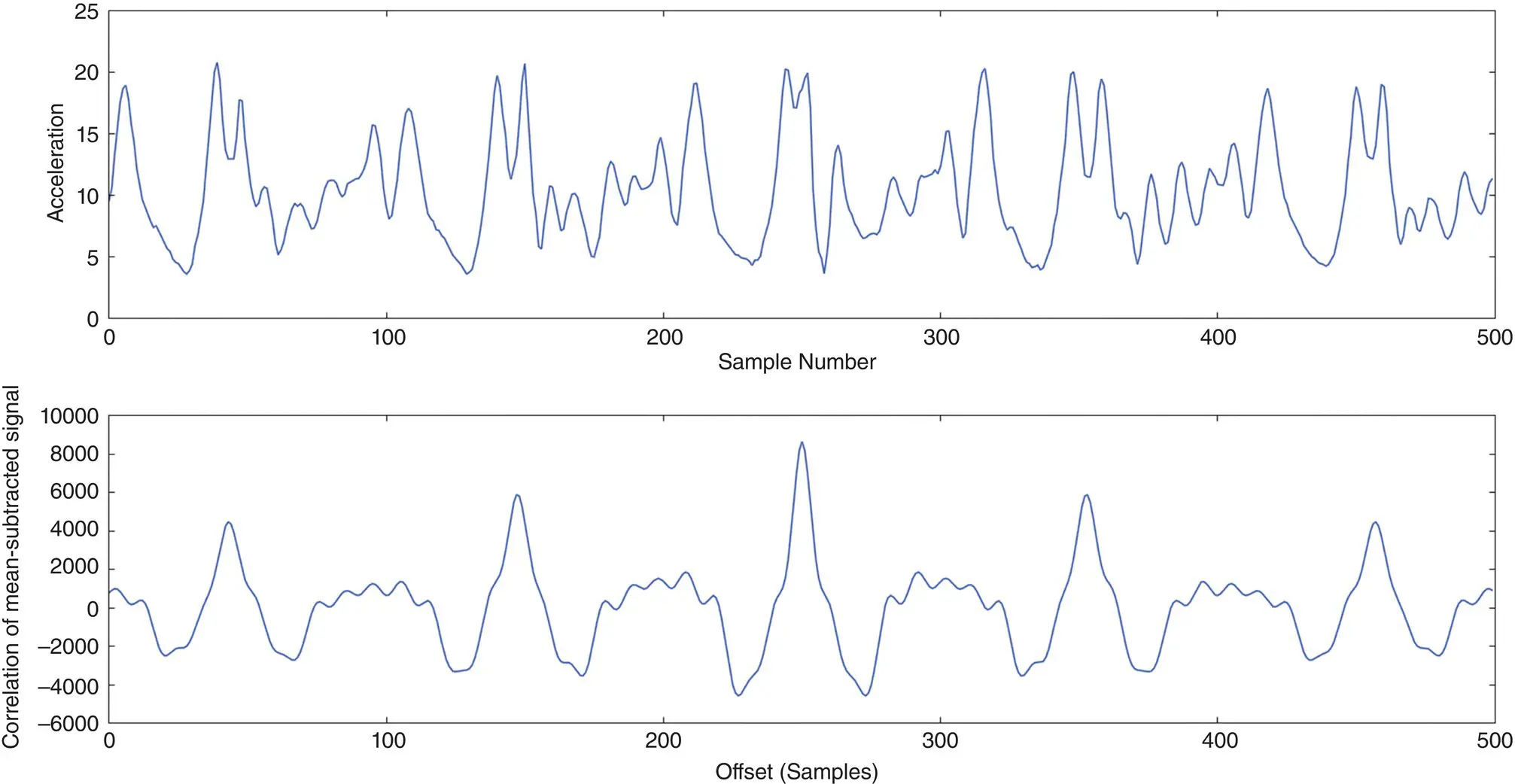
Figure 37.6 Autocorrelation‐based step cycle detection. The top graph shows the raw acceleration magnitude during five sample strides. The autocorrelation of the mean‐subtracted signal is shown in the bottom graph, with strong peaks associated with each stride [105].
Source: Reproduced with permission of IEEE.
While accurate stride length improves displacement estimation, the accuracy increase is often marginal as drifts in heading (the direction of motion) typically dominate errors [126]. The heading direction of steps during motion can be obtained with a gyroscope or a compass (magnetometer). Gyroscopes output angular velocities in 3D, which are integrated over time to obtain direction change information. A turn can be detected when the relative orientation measured by a gyroscope changes abruptly. To distinguish between changes due to turns and changes caused by noise, only heading changes exceeding a predefined threshold are determined as turns [127]. A compass can measure the absolute orientation (heading) of the mobile device (e.g. smartphone) with respect to the magnetic north. However, Earth’s magnetic field is relatively weak at the surface, and buildings that are filled with metal and conducting wires can overpower the natural signal, leading to local “disturbances” (e.g. location‐specific magnetic offsets that can cause heading errors of up to 100 o[128]). Some efforts attempt to filter the magnetic offset on consecutive compass readings, to improve accuracy [129]. An increasingly popular solution to overcome the offset is to combine gyroscope and magnetometer readings as the two sensors have complementary error characteristics: gyroscopes provide poor long‐term orientation, while magnetometers are subject to short‐term orientation errors [130]. In general, multiple types of inertial sensors perceive similar movements during walking, which can be used to overcome errors; for example, a compass value can be considered valid if the readings of the compass and gyroscope in the INS unit experience a correlated trend [111], which can help discard compass values containing a severe magnetic offset.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century»
Представляем Вашему вниманию похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.











Обсуждение, отзывы о книге «Position, Navigation, and Timing Technologies in the 21st Century» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.