Position, Navigation, and Timing Technologies in the 21st Century
Здесь есть возможность читать онлайн «Position, Navigation, and Timing Technologies in the 21st Century» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Position, Navigation, and Timing Technologies in the 21st Century
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Position, Navigation, and Timing Technologies in the 21st Century: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Position, Navigation, and Timing Technologies in the 21st Century»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Volume 1 of
contains three parts and focuses on the satellite navigation systems, technologies, and engineering and scientific applications. It starts with a historical perspective of GPS development and other related PNT development. Current global and regional navigation satellite systems (GNSS and RNSS), their inter-operability, signal quality monitoring, satellite orbit and time synchronization, and ground- and satellite-based augmentation systems are examined. Recent progresses in satellite navigation receiver technologies and challenges for operations in multipath-rich urban environment, in handling spoofing and interference, and in ensuring PNT integrity are addressed. A section on satellite navigation for engineering and scientific applications finishes off the volume.
Volume 2 of
consists of three parts and addresses PNT using alternative signals and sensors and integrated PNT technologies for consumer and commercial applications. It looks at PNT using various radio signals-of-opportunity, atomic clock, optical, laser, magnetic field, celestial, MEMS and inertial sensors, as well as the concept of navigation from Low-Earth Orbiting (LEO) satellites. GNSS-INS integration, neuroscience of navigation, and animal navigation are also covered. The volume finishes off with a collection of work on contemporary PNT applications such as survey and mobile mapping, precision agriculture, wearable systems, automated driving, train control, commercial unmanned aircraft systems, aviation, and navigation in the unique Arctic environment.
In addition, this text:
Serves as a complete reference and handbook for professionals and students interested in the broad range of PNT subjects Includes chapters that focus on the latest developments in GNSS and other navigation sensors, techniques, and applications Illustrates interconnecting relationships between various types of technologies in order to assure more protected, tough, and accurate PNT
will appeal to all industry professionals, researchers, and academics involved with the science, engineering, and applications of position, navigation, and timing technologies.pnt21book.com
Position, Navigation, and Timing Technologies in the 21st Century — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Position, Navigation, and Timing Technologies in the 21st Century», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
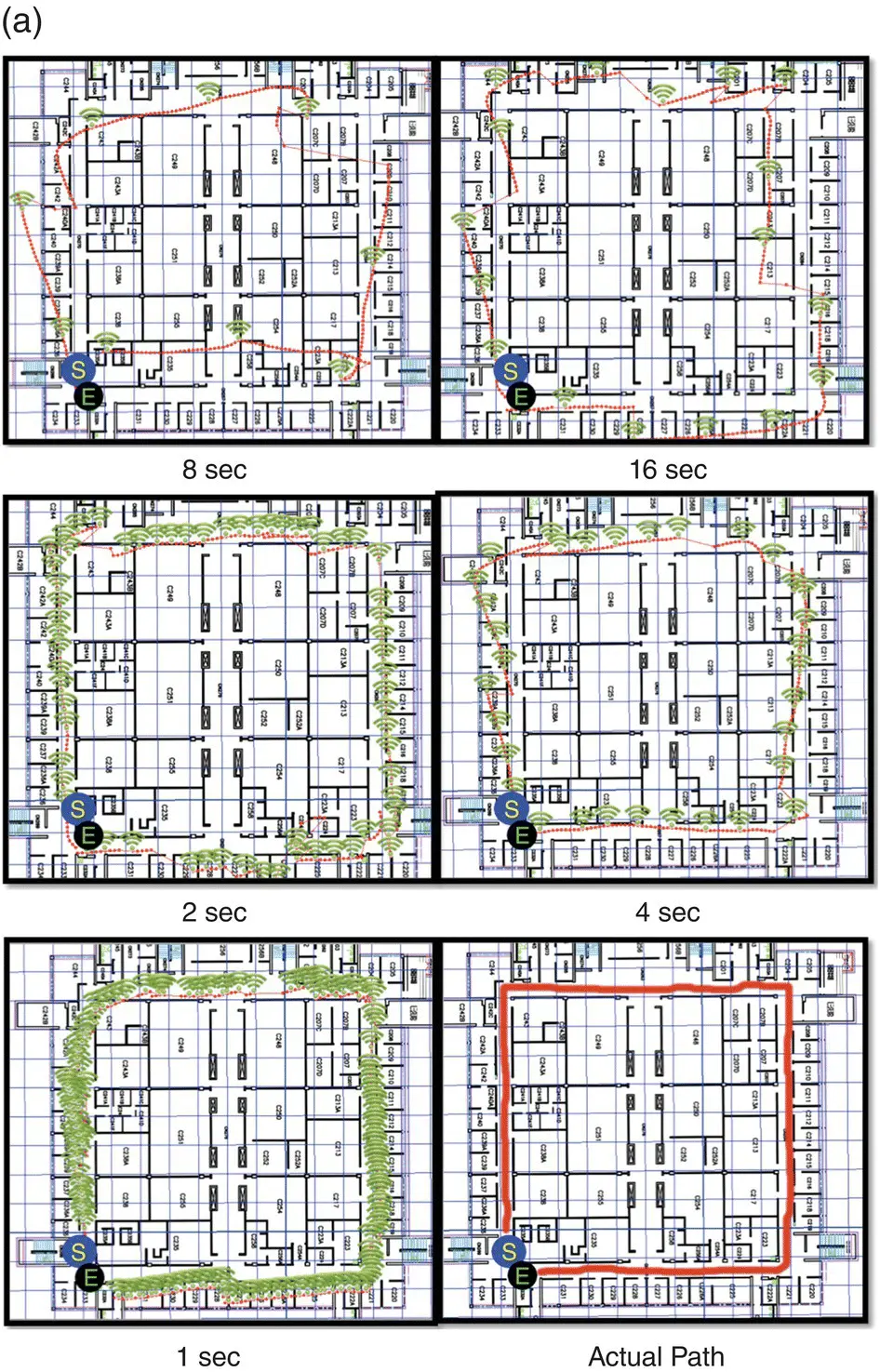
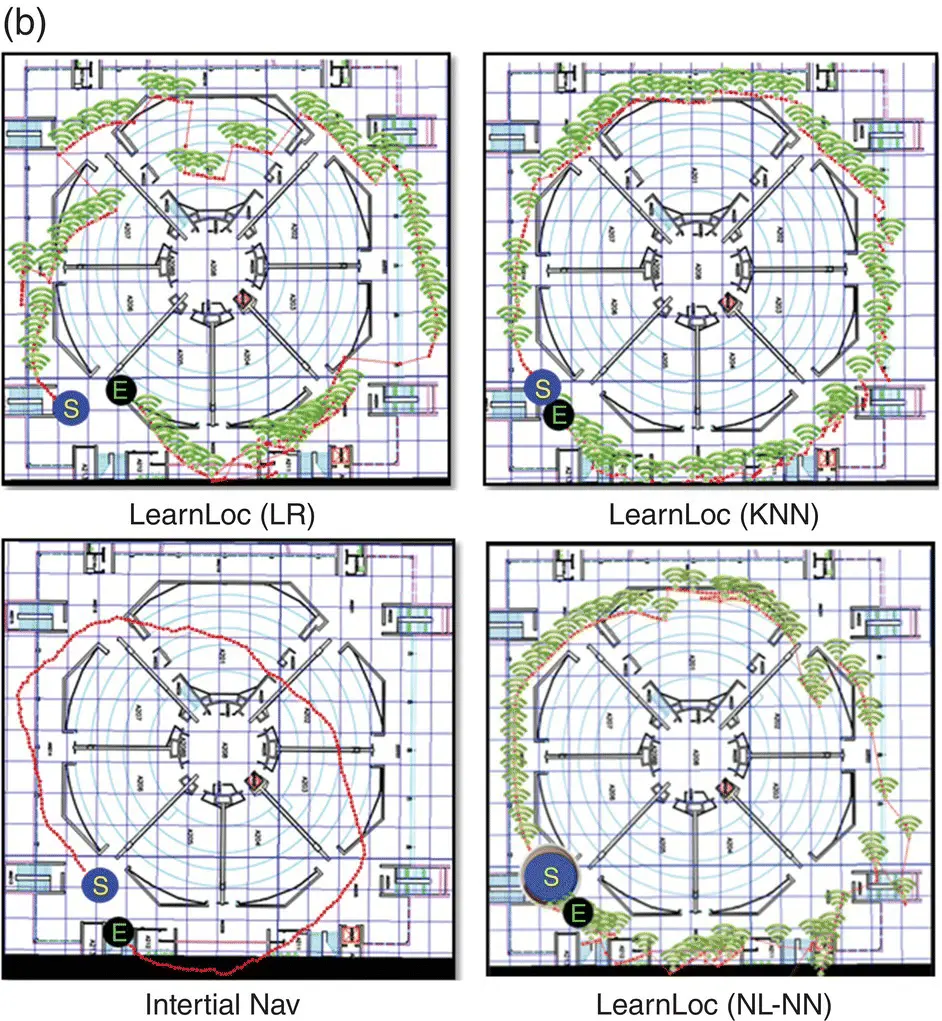
Figure 37.8 (a) Paths traced for various Wi‐Fi scan intervals for LearnLoc using K‐nearest neighbor (KNN) along the Clark L2 South path; green dots represent an instance of a Wi‐Fi scan along the path; (b) paths traced by indoor localization techniques along the Clark L2 North building benchmark path [148].
Source: Reproduced with permission of IEEE.
37.5.6.3 Techniques Fusing RF Signals with Other Signals
Many techniques propose to combine RF signal data with readings from other sources beyond inertial sensors. SurroundSense [149] utilizes fingerprints of a location based on RF (GSM, Wi‐Fi) signals as well as ambient sound, light, color, and the layout‐induced user movement (detected by an accelerometer). Cameras, microphones, and accelerometers on a Wi‐Fi‐enabled Nokia N95 phone were used to sense the fingerprint information. The sensed values are recorded, pre‐processed, and transmitted to a remote SurroundSense server. The goal of pre‐processing on the phone is to reduce the data volume that needs to be transmitted. Once the sensor values arrive at the server, they are separated by the type of sensor data (sound, color, light, Wi‐Fi, accelerometer) and distributed to different fingerprinting modules. These modules perform a set of appropriate operations, including color clustering, light extraction, and feature selection. The individual fingerprints from each module are logically inserted into a common data structure, called the ambience fingerprint, which is forwarded to a fingerprint matching module for localization. Support vector machines (SVMs), color clustering, and other simple methods were used for location classification.
The Acoustic Location Processing System (ALPS) [156] combines BLE transmitters with ultrasound signals to improve localization accuracy and also help users configure indoor localization systems with minimal effort. ALPS consists of time‐synchronized beacons that transmit ultrasonic chirps that are inaudible to humans, but are still detectable by most modern smartphones. The phone uses the TDoA of chirps to measure distances. ALPS uses BLE on each node to send relevant timing information, allowing for the entire ultrasonic bandwidth to be used exclusively for ranging. The platform requires a user to place three or more beacons in an environment and then walk through a calibration sequence with a mobile device where they touch key points in the environment (e.g. the floor and the corners of the room). This process automatically computes the room geometry as well as the precise beacon locations without needing auxiliary measurements. Once configured, the system can track a user’s location referenced to a map. Other techniques such as SmartLOCUS [157] and Cricket [158] also use a combination of RF and ultrasound technologies, where the TDoA between RF and ultrasound signals (generated by wall‐ and ceiling‐mounted beacons) is used to measure distance and localize mobile subjects.
Radianse [159] and Versus [160] use a combination of RF and IR signals to perform location positioning. Their tags emit IR and RF signals containing a unique identifier for each person or asset being tracked. The use of RF allows coarse‐grain positioning (e.g. floor level granularity), while the IR signals provide additional resolution (e.g. room granularity). The EIRIS local positioning system [161] uses an IRFID triple technology that combines IR, RF (UHF), and LF (RF low‐frequency transponder) signals. It combines the advantages of each technology, that is, the room location granularity of IR, the wide range of RF, and the tailored range sensitivity of LF.
The CUPID2.0 indoor positioning system [162] combines ToF‐based localization with signal strength information to improve indoor localization with Wi‐Fi RF signals. The proposed architecture consists of a location server and multiple Wi‐Fi APs, each of which talks to the mobile device. ToA‐based trilateration methods are used to determine the device location. In particular, the time of flight of the direct path (TFDP), as calculated from the data‐ACK exchange between the AP and the device, is used for distance estimation. TFDP is then combined with measurements of signal strength, particularly the EDP [82], to improve accuracy and also ensure scalability. The system was implemented, deployed, and analyzed at six cities across two different continents for more than 14 months with 40 different mobile devices and more than 2.5 million location fixes, and was shown to achieve a mean localization error of 1.8 m.
37.5.6.4 Techniques Fusing Dead Reckoning with Non‐RF Signals
A few indoor localization techniques combine inertial sensors with non‐RF signals. In [163], the IDyLL indoor localization system is proposed that combines dead reckoning with light measurements from photodiode sensors on smartphones. Typical luminaire sources (including incandescent, fluorescent, and LED) are often uniquely (sometimes evenly) spaced in many indoor environments. Moreover, most smartphones have light sensors (photodiodes) for automatic brightness adjustment that can theoretically sample at a high rate (e.g. 1.17 MHz for APDS‐9303 on Nexus 5 and 7 devices), although they are often constrained either by the hardware interface or the OS‐level support to a few hertz to up to 100 Hz. IDyLL samples the light sensors at 10 Hz, and uses an illumination peak detection algorithm to gather light readings. The readings are combined with those obtained from inertial sensors, as well as knowledge of the floor map and luminary placement, to achieve fine‐grained indoor localization. The approach in [164] combines dead reckoning, laser scanners, and image‐based localization, all integrated in a human‐carried backpack which can be used to generate 3D models of complex indoor environments. The locations are determined from data capture based on two laser scanners and an inertial measurement unit. The localization performance could be improved by making use of camera images that have been taken in an offline phase. The images can be used to refine the six parameters of the camera pose and improve the quality of the 3D textured model.
37.6 Open Research Issues
Indoor localization systems are steadily becoming more mature, but there are still several challenges that must be addressed, as outlined in [165], which discusses the experiences and lessons learned from Microsoft’s indoor localization competition. Below we provide a holistic overview of some of the key open research challenges in the area of indoor localization.
Evaluation methodologies. The outcomes of studies to determine the efficacy of an indoor localization solution can be impacted by several factors, such as the building type and size, construction materials and layout along the analyzed indoor paths, lengths of the indoor paths, characteristics of test subjects, and the test procedure followed (including duration and the degree of “natural” activity) [126]. There is currently very little consensus on how to evaluate various indoor localization solutions, which hinders an appropriate comparison. Because of stark differences in the above‐listed factors (that are also not often clearly presented) across evaluation studies, claims made in literature about the accuracy of a particular solution are often difficult to reproduce. Many solutions in literature are content with a very simple proof‐of‐concept evaluation, with contrived walking tests along indoor locales that are limited in scope (e.g. testing with a single subject). Moreover, manually evaluating indoor localization technologies is a tedious and time‐consuming process. It may be possible to reduce evaluation overhead with an automated robot‐based benchmarking platform that can also improve the fidelity of the evaluation process.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century»
Представляем Вашему вниманию похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.











Обсуждение, отзывы о книге «Position, Navigation, and Timing Technologies in the 21st Century» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.