Annette Kluge - Arbeits- und Organisationspsychologie
Здесь есть возможность читать онлайн «Annette Kluge - Arbeits- und Organisationspsychologie» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на немецком языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Arbeits- und Organisationspsychologie
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Arbeits- und Organisationspsychologie: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Arbeits- und Organisationspsychologie»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Das Lehrbuch vermittelt die Theorien des Organisierens sowie die Bedingungen und Strategien der Veränderungen in und von Organisationen. Die Leser*innen erfahren, wie Organisationen als Kultur- und Klima-produzierende Systeme diese Veränderungen fördern und behindern können. Es wird zudem ausführlich auf die Relevanz des Human Ressource Management für die Organisationsstrategie, die Kommunikation mit Stakeholdern und die vielschichtigen positiven und negativen Wirkungen von Arbeit, wie Stress und Ermüdung oder Flow und Persönlichkeitsentwicklung, eingegangen.
Dem Thema interne Kommunikation wird ein eigenes Kapitel gewidmet, da es maßgeblich die Arbeitszufriedenheit beeinflusst und von den Mitarbeiter*innen häufig als nicht ausreichend beklagt wird. Die externe Kommunikation hat im Kontext von gestiegenen Erwartungen von Stakeholdern, wie Anwohner*innen, Bürger*innen und Naturschutzorganisationen, inzwischen ebenfalls eine hohe Priorität für Organisationen und muss aktiver und strategischer geplant und umgesetzt werden.
Abschließend werden die Einflussfaktoren auf die Leistung und das Verhalten von Mitarbeiter*innen in Organisationen aufgezeigt, bei denen Führungsprozesse eine wichtige Rolle spielen, wenn auch nicht die alleinige.
Zentraler roter Faden des Buches ist dabei die Notwendigkeit von Organisationen, sich an die Veränderungen ihres Umfelds (des Marktes, der Gesetzgebung, der Technologie, der gesellschaftlichen Werte) anzupassen. Die Anpassungsprozesse betreffen dabei die Reflektion und Neuausrichtung der organisationalen Ziele, der Strategie, und damit die Struktur, Führungsprozesse und -leitlinien und die personalbezogenen Maßnahmen.
Es werden zentrale Theorien und Konzepte dieser organisationalen Aspekte vorgestellt und die bis dato vorliegenden empirischen Ergebnisse dazu reflektiert. Zu jedem Aufgabenbereich der Organisation wird vor dem Hintergrund der digitalen Transformation von Wirtschaft und Gesellschaft die aktuelle Entwicklung sowie die zukünftigen Potenziale für die Arbeit von Arbeits- und Organisationspsycholog*innen vorgestellt.
Arbeits- und Organisationspsychologie — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Arbeits- und Organisationspsychologie», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Auch wenn einem die Bilder von derartigen Katastrophen lange im Kopf bleiben, so operieren die meisten dieser Organisationen weltweit fehlerfrei und unfallfrei. In den späten 1980er Jahren nahm das Interesse an diesen HROs zu, um aus deren Managementsystemen auch für andere Unternehmen und Organisationen Schlussfolgerungen zu ziehen.
Nach La Porte und Consolini (1998) operieren HROs in drei verschiedenen Modi:
1. Der Routine-Modus. Im Routine-Modus arbeitet eine HRO wie eine normale, bürokratisch aufgebaute Organisation. Regeln und Vorschriften sowie hierarchische Über- und Unterordnungsprinzipien dominieren das »Tagesgeschäft«. Der/die Vorgesetzte weiß sehr gut, was in der Organisation vor sich geht.
2. Der High Tempo-Modus. Eine Ebene unterhalb des Routine-Modus liegt in HROs ein anderes Muster von Koordination vor. Bei steigenden Anforderungen und Belastungen, z. B. bei Gewitter und Schneetreiben an einem Tag der Flugsicherung in Frankfurt, wechselt eine HRO in den High Tempo-Modus. Die traditionelle Bürokratie tritt zur Seite und die fachliche Kompetenz der Operateure vor Ort (im Beispiel der Flugsicherung die der Fluglotsen) tritt in den Vordergrund, da die Vorgesetzten selbst zu wenig wissen, um in solchen sehr anspruchsvollen Situationen sinnvoll einzugreifen. Im High Tempo-Modus zählt Professionalität der Operateure mehr als hierarchischer Status.
3. Der Emergency Response-Modus. Im Emergency Response-Modus operiert die Organisation auf Basis der eindeutigen Spezifikationen von Notfällen (emergencies). Verantwortlichkeitsstrukturen sind vordefiniert und vorprogrammiert und werden auf der Basis von geskripteten Teamworkprozessen in sofortigen Handlungen und Aktivitäten ausgeführt.
HROs können somit als Organisationen mit verschiedenen Handlungsebenen beschrieben werden (»multi-layered, nested complexity«, La Porte & Consolini, 1998, S. 852). Es gibt also nicht nur eine organisationale Struktur, sondern mehrere, jeweils für den Routine-, den High Tempo- und den Emergency Response-Modus. Entscheidungen werden je nach Modus zentral oder dezentral gefällt.
Neben einer hohen Automatisierung technischer Prozesse als Voraussetzung für den Routine-Modus, z. B. im Kraftwerks- oder Chemiesektor, sowie einer hoher Standardisierung von Abläufen anhand von Standard Operating Procedures (SOPs, Kluge, 2014) haben diese HROs Handlungsweisen und Führungsmethoden entwickelt, die sie in die Lage versetzen, das »Unerwartete« besser zu bewältigen als die meisten anderen Organisationen (Weick & Sutcliffe, 2003). Diese Handlungsweisen und Führungsmethoden basieren auf dem Konzept der Achtsamkeit (Mindfulness, Weick & Sutcliffe 2003; Weick, Sutcliffe & Obstfeld, 2008). Die Organisation besitzt eine ausgeprägte Fähigkeit, Fehler zu entdecken und zu berichtigen, ehe sie zu einer Krise eskalieren können.
HROs zeichnen sich zudem durch eine Achtsamkeits-Kultur aus. Standardprozeduren (SOPs) können das Verhalten und die Motivation für diese Form der zuverlässigen Zusammenarbeit nicht im Detail beschreiben, sondern es entwickelt sich eine besondere Kultur (  Kap. 3). Die Kultur enthält die Werte und Normen, auf denen die Zusammenarbeit in HROs beruht (La Porte, 1996). Abbildung 1.11 fasst die wesentlichen Merkmale von HROs nach Lekka (2011) und Lekka und Sugden (2011) zusammen ( Abb. 1.11).
Kap. 3). Die Kultur enthält die Werte und Normen, auf denen die Zusammenarbeit in HROs beruht (La Porte, 1996). Abbildung 1.11 fasst die wesentlichen Merkmale von HROs nach Lekka (2011) und Lekka und Sugden (2011) zusammen ( Abb. 1.11).
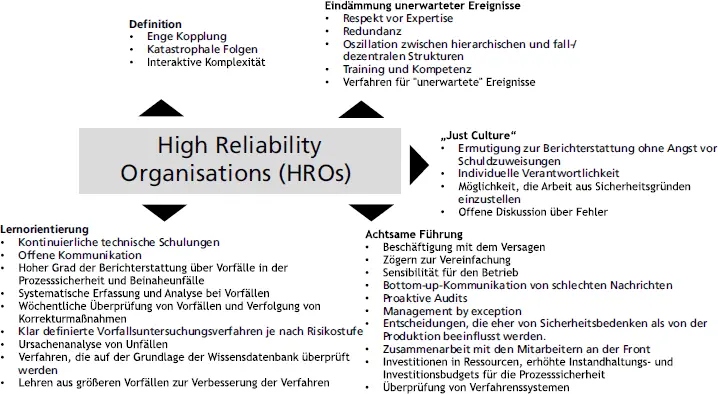
Abb. 1.11: Merkmale von High Reliability-Organisationen (nach Lekka (2011) und Lekka & Sugden (2011))
Es lässt sich zusammenfassen, dass die Arbeiten zu HROs im engeren Sinne keine eigenständigen Organisationstheorien darstellen, sondern spezielle Fälle von Organisationen betrachten, die mit ihren Prinzipien der Achtsamkeit als Vorbild auch für andere Organisationen dienen können. Im Sinne von Huber (2011) interessieren sich Organisationsforscher/innen für die Gesamtheit der HROs und arbeiten mit Methoden der Organisationsforschung heraus, wie diese Gesamtheit von Organisationen ihr Ziel der hohen Zuverlässigkeit erreicht.
Auf HROs wird noch einmal im Kapitel Arbeitspsychologie / Safety Management ( Kap. 6) zu sprechen kommen.
Organisationen als cyber-physische Systeme
Stellen Sie sich Folgendes vor: Sie kommen in eine Fertigungshalle eines Automobilhersteller. Sie sehen keine Fließfertigung oder Fließbänder. Die zu fertigenden Fahrzeuge suchen sich ihren Weg durch die Produktionsschritte und Prozessmodule selbst. Ein Fahrzeug wird ab dem ersten Fertigungsschritt als flexibles Vernetzungsvehikel genutzt (Bauernhansl, 2014), denn es ist ein cyber-physisches System (CPS, Erklärung unten). Solch ein Fahrzeug ist ebenso ein »Smart Product«: Es kennt seine Eigenschaften, und weiß, wie es gefertigt werden will oder mit welchen anderen Produkten (Teilen einer Maschine oder Anlage) es verbunden werden kann. So kann es selbstständig bei den Prozessmodulen anfragen, welches denn gerade Zeit hat (Kluge & Hagemann, 2016). Sie sehen zudem Produktionsmitarbeiter/innen, die ihren Tablet-PC vor eine Anlage halten und denen durch Formen der Augmented Reality (computergestütztes Überblenden oder Erweitern eines Ausschnitts der Realität, z. B. ein Kamerabild mit zusätzlichen Informationen) auszutauschende Komponenten angezeigt werden. Zudem sehen Sie Personen, die mit Hilfe von über eine Datenbrille angezeigten Reparaturanweisungen Komponenten austauschen.
Cyber-physische Systeme (CPS) sind im umfassenden Sinne Objekte, Geräte, Gebäude, Verkehrsmittel, aber auch Produktionsanlagen und Logistikkomponenten. Sie enthalten eingebettete Systeme, die kommunikationsfähig gemacht werden, d. h. die Daten über ihren eigenen Zustand senden können und Daten über andere Fertigungskomponenten oder Anlagen empfangen können. Der Begriff »eingebettetes System« bezeichnet ein Rechner- oder Computersystem, welches Teil eines größeren technischen Systems ist. Dabei übernimmt das eingebettete System Regelungs- oder Datenverarbeitungsaufgaben, die zum Betrieb des größeren technischen Systems notwendig sind. Eingebettete Systeme sind bisher meist limitiert in Rechenleistung und Speicherkapazität, da sie in der Regel kostengünstig produziert werden müssen. Diese eingebetteten Systeme können zukünftig auch die Kommunikation mit anderen Systemen übernehmen. Sie kommunizieren über Internetverbindung und nutzen Internetdienste (Bauernhansl, 2014; Gronau, 2015; Monostori, 2014; Sendler, 2013). Cyber-physische Systeme können ihre Umwelt unmittelbar mit ihrer entsprechenden Sensorik erfassen, mit Hilfe weltweit verfügbarer Daten und Dienste auswerten, speichern und mit Hilfe von Aktoren (zum Ergreifen und Bearbeiten von Gegenständen; Aktoren sind Gegenstücke zu Sensoren) auf die physikalische Welt einwirken (Bauernhansl, 2014; Gronau, 2015; Monostori, 2014). Unser Fahrzeug als CPS könnte dementsprechend sowohl lokal als auch global verfügbare Daten und Dienste (Internet der Menschen, Internet der Dinge, Internet der Dienste) integrieren und nutzen (Kluge & Hagemann, 2016). Es würde über eine Reihe multimodaler Mensch-Maschine-Schnittstellen verfügen, um mit anderen technischen Komponenten zu kommunizieren und die eigene Produktion zu koordinieren und dafür ebenfalls unterschiedliche Möglichkeiten bereitstellen, mit den Produktionsmitarbeiter/innen über z. B. Sprache und Gesten zu kommunizieren (Vogel-Heuser, 2014).
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Arbeits- und Organisationspsychologie»
Представляем Вашему вниманию похожие книги на «Arbeits- und Organisationspsychologie» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Arbeits- und Organisationspsychologie» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.