Hassan Bevrani - Renewable Integrated Power System Stability and Control
Здесь есть возможность читать онлайн «Hassan Bevrani - Renewable Integrated Power System Stability and Control» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Renewable Integrated Power System Stability and Control
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Renewable Integrated Power System Stability and Control: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Renewable Integrated Power System Stability and Control»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Renewable Integrated Power System Stability and Control A thorough introduction to power systems, including time horizon studies, structure, power generation options, energy storage systems, and microgrids An exploration of renewable integrated power grid modeling, including basic principles, host grid modeling, and grid-connected MG equivalent models A study of virtual inertia, including grid stability enhancement, simulations, and experimental results A discussion of renewable integrated power grid stability and control, including small signal stability assessment and the frequency point of view Perfect for engineers and operators in power grids, as well as academics studying the technology,
will also earn a place in the libraries of students in Electrical Engineering programs at the undergraduate and postgraduate levels who wish to improve their understanding of power system operation and control.
Renewable Integrated Power System Stability and Control — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Renewable Integrated Power System Stability and Control», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
1.2.3 Oscillation Damping
Traditionally, the power system oscillations are damped through the generator local controllers, such as the exciter and governor, which are designed to ensure only the local stability of the generator (1–2 Hz). In order to increase the stability of the system, PSSs and power electronic converter‐based FACTS are added into the grid [99–101]. In a broader context, the power system oscillation problem has also been related to voltage stability. The control interaction is discussed in [102, 103]. The exploitation of the wide‐area measurements, provided by PMUs, for monitoring and controlling the power system led to the introduction of the wide‐area monitoring and control (WAMC) systems [104]. The advent and application of synchronized measurement technology has enabled the detection and observation of poorly damped oscillations (such as the inter‐area modes) and became the backbone for more development of the WAMC systems [105]. Inter‐area oscillations are characterized by low frequency (0.2–1 Hz) and occur when generators of one group swing against generators of another group [106]. Integration of RESs into the WAC scheme for damping power oscillations is discussed in [107, 108]. The utilization of a networked control system model for the WAC design, according to linear matrix inequality techniques, is proposed in [111]. Furthermore, Ref. [110] presents a WAC design, based on particle swarm optimization, for improving the performance of the power system through the control of wind farms.
More specifically, WAC aims to utilize the synchronized phasor measurements in order to provide coordination signals to the local controllers, making them capable of damping effectively all the inter‐area oscillations [100]. In the literature, various works deal with the development of a WAC system. The proposed WAC schemes are segregated mainly according to the components of the power system that the WAC is intended to coordinate [3, 110]. Multiple control methodologies have been developed for damping the inter‐area oscillations deploying a WAMC. In [83], a decentralized/hierarchical architecture for wide‐area damping control using PMU remote feedback signals was discussed. References [100, 111] proposed the design of wide‐area damping controllers that provide supplementary damping control to synchronous generators (SGs). A networked control system model for wide‐area closed‐loop power systems is applied in [109]. A power oscillation damping controller is introduced in [112] based on a modal linear quadratic Gaussian methodology. A combination of controlling SGs and renewable sources in order to increase the overall damping capability of the system is shown in [101, 107, 108, 113]. Few LPV control solutions to power oscillation damping are proposed that use either a low‐order first principle model of the system [114] or a reduced‐order parametric LPV identified model [115].
In comparison of frequency and voltage control, a higher number of reports have been published in PMU‐based oscillation damping (rotor angle control) field. However, most of the reported approaches require the detailed and accurate knowledge of the complete network model (both topology and parameter values), that is unavailable or corrupted in practice as a result of communication failures, bad data in state estimation etc. In addition, the impact of disturbances on the inter‐area oscillations cannot be well captured by these methods.
1.3 Data‐Driven Wide‐Area Power System Monitoring and Control
Power grids modeling and control has become a more challenging issue due to the increasing penetration of RESs, changing system structure and the integration of new storage systems, controllable loads and power electronics technologies, and reduction of system inertia. Conventional modeling and control designs may not be any more effective to satisfy all specified objectives in various operation modes of modern power grids. These challenging issues set new demand for the development of more flexible, rapid, effective, precise, and adaptive approaches for power system dynamic monitoring, stability/security analysis, and control problems. Thanks to recent advances in control, communication, and computing technologies, it is possible to tackle mentioned challenges by implementing a data‐driven‐based modeling and control framework as shown in Figure 1.2.
The system data are collected from the distributed PMUs in the grid through a secure communication network. The development of information and communication technology (ICT) enables more flexibility in wide‐area monitoring of power system with fast and large data transmission. Especially, the wide‐area measurement system (WAMS) with PMUs is a promising technique as one of the smart grid technologies in the bulk power grid.
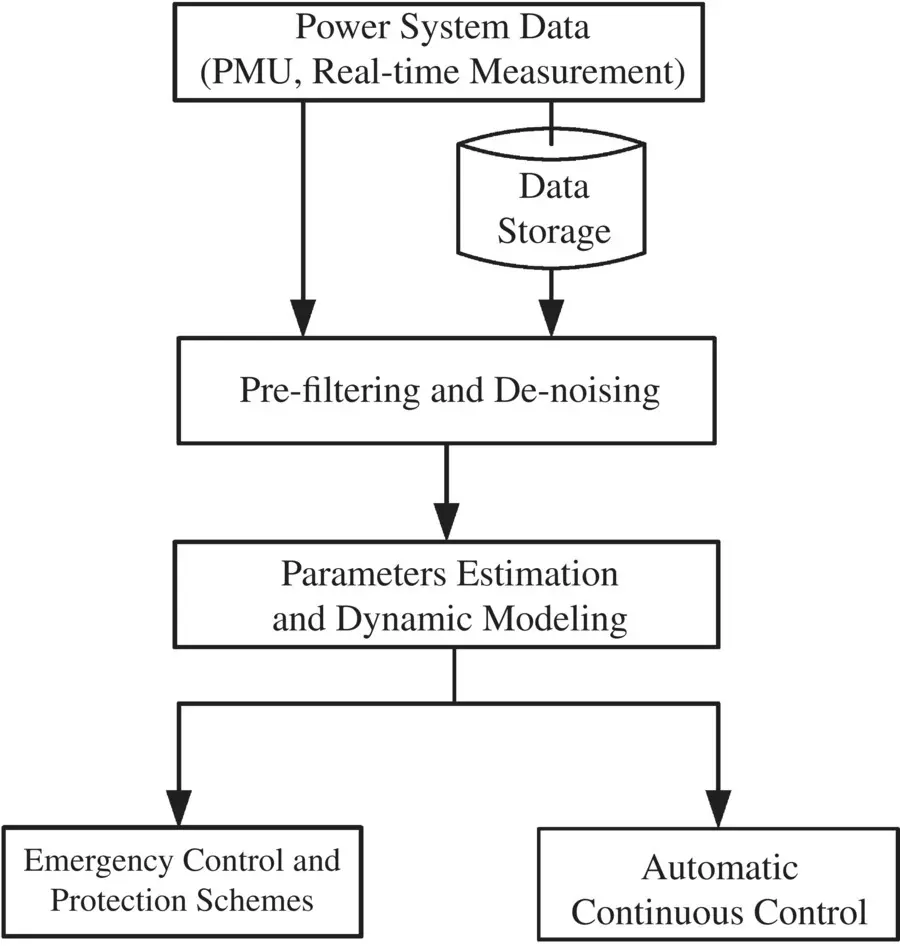
Figure 1.2An overall data‐driven control framework for renewable integrated power systems.
The measured data are locally saved and then collected by phasor data concentrators (PDCs) for the post analysis or sent to a remote location via a standard data format. These data with the time stamp of the synchronized GPS in real time may applied for parameter and state estimations and finally used for the system protection and/or real‐time control. Figure 1.3shows how a PMU‐based WAMS can provide data for the power system control center to generate continuous (in normal states) and discontinuous control (in off‐normal states) commands.
Before any application, the collected PMU data need to be cleaned and de‐noised and employed by the data processors for estimation, modeling, and control purposes. The proposed de‐noising method may use a rolling‐averaging window with pre‐specified length to remove noise from the recorded data. The block of parameters estimation algorithms contains high fast and precise algorithms for estimation of some important parameters and transient characteristics that are required to use in control tuning algorithm or to detect a contingency and triggering the emergency control and protection schemes. In case of crossing the assigned thresholds showing an off‐normal and emergency condition, the recorded data and some estimated parameters are used to detect the amount of mismatch (size of disturbance) for the emergency control and protection schemes such as load shedding algorithms. Otherwise, the estimated parameters such as scheduling parameters are employed by the continuous control systems.
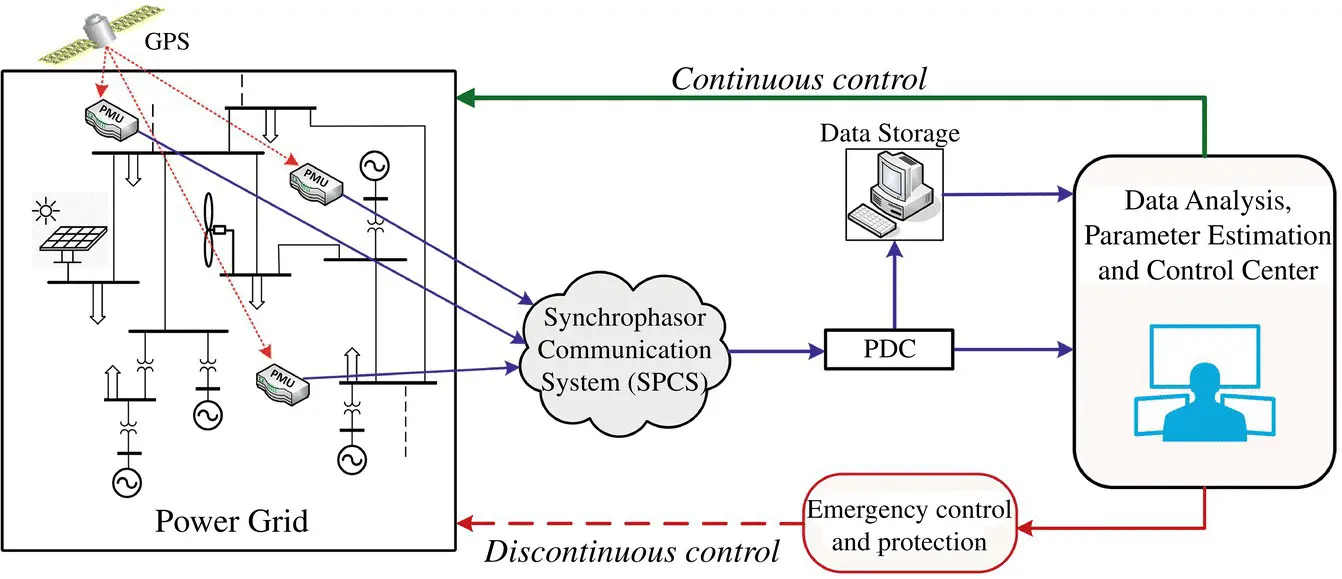
Figure 1.3PMU‐based wide‐area measurement system and control.
As mentioned, using significant number of distributed micro‐sources into power systems adds new technical challenges. As the electric industry seeks to reliably integrate large amounts of DGs/RESs into the power system in regulated environment, considerable effort is needed to accommodate and effectively manage the installed micro‐sources. A key aspect is how to handle changes in topology and dynamics caused by penetration of numerous DGs/RESs in the network and how to make the power grid robust and able to take advantage of the potential flexibility of distributed micro‐sources. In a modern control framework, a part of power produced by available DGs/RESs in the grid are used as a primary energy source of inertia emulator to provide virtual inertia as a supporting control for abovementioned controllers (like a fine tuner) to improve power grid stability.
1.4 Dynamics Modeling and Parameters Estimation
Интервал:
Закладка:
Похожие книги на «Renewable Integrated Power System Stability and Control»
Представляем Вашему вниманию похожие книги на «Renewable Integrated Power System Stability and Control» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.









Обсуждение, отзывы о книге «Renewable Integrated Power System Stability and Control» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.