Savo G. Glisic - Artificial Intelligence and Quantum Computing for Advanced Wireless Networks
Здесь есть возможность читать онлайн «Savo G. Glisic - Artificial Intelligence and Quantum Computing for Advanced Wireless Networks» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Artificial Intelligence and Quantum Computing for Advanced Wireless Networks
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Artificial Intelligence and Quantum Computing for Advanced Wireless Networks: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Artificial Intelligence and Quantum Computing for Advanced Wireless Networks»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
A practical overview of the implementation of artificial intelligence and quantum computing technology in large-scale communication networks Artificial Intelligence and Quantum Computing for Advanced Wireless Networks
Artificial Intelligence and Quantum Computing for Advanced Wireless Networks
Artificial Intelligence and Quantum Computing for Advanced Wireless Networks — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Artificial Intelligence and Quantum Computing for Advanced Wireless Networks», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
(4.4) 
This clearly satisfies Eqs. (4.1)and (4.2); however, the relevances R (1)( x d) of all input dimensions have the same sign as the prediction f ( x ). In terms of pixel‐wise decomposition interpretation, all inputs point toward the presence of a structure if f ( x ) > 0 and toward the absence of a structure if f ( x ) < 0. This is for many classification problems not a realistic interpretation. As a solution, for this example we define an alternative
(4.5) 
Then, the relevance of a feature dimension x ddepends on the sign of the term in Eq. (4.5). This is for many classification problems a more plausible interpretation. This second example shows that LRP is able to deal with nonlinearities such as the feature space mapping φ dto some extent and how an example of LRP satisfying Eq. (4.2)may look like in practice.
The above example gives an intuition about what relevance R is, namely, the local contribution to the prediction function f ( x ). In that sense, the relevance of the output layer is the prediction itself: f ( x ). This first example shows what one could expect as a decomposition for the linear case. The linear case is not a novelty; however, it provides a first intuition. A more graphic and nonlinear example is given in Figure 4.1. The upper part of the figure shows a neural‐network‐shaped classifier with neurons and weights w ijon connections between neurons. Each neuron i has an output a ifrom an activation function.The top layer consists of one output neuron, indexed by 7. For each neuron i we would like to compute a relevance R i. We initialize the top layer relevance  as the function value; thus,
as the function value; thus,  . LRP in Eq. (4.2)requires now to hold
. LRP in Eq. (4.2)requires now to hold
(4.6) 
(4.7) 
We will make two assumptions for this example. First, we express the layer‐wise relevance in terms of messages  between neurons i and j which can be sent along each connection. The messages are, however, directed from a neuron toward its input neurons, in contrast to what happens at prediction time, as shown in the lower part of Figure 4.1. Second, we define the relevance of any neuron except neuron 7 as the sum of incoming messages ( k : i is input for neuron k ):
between neurons i and j which can be sent along each connection. The messages are, however, directed from a neuron toward its input neurons, in contrast to what happens at prediction time, as shown in the lower part of Figure 4.1. Second, we define the relevance of any neuron except neuron 7 as the sum of incoming messages ( k : i is input for neuron k ):
(4.8) 
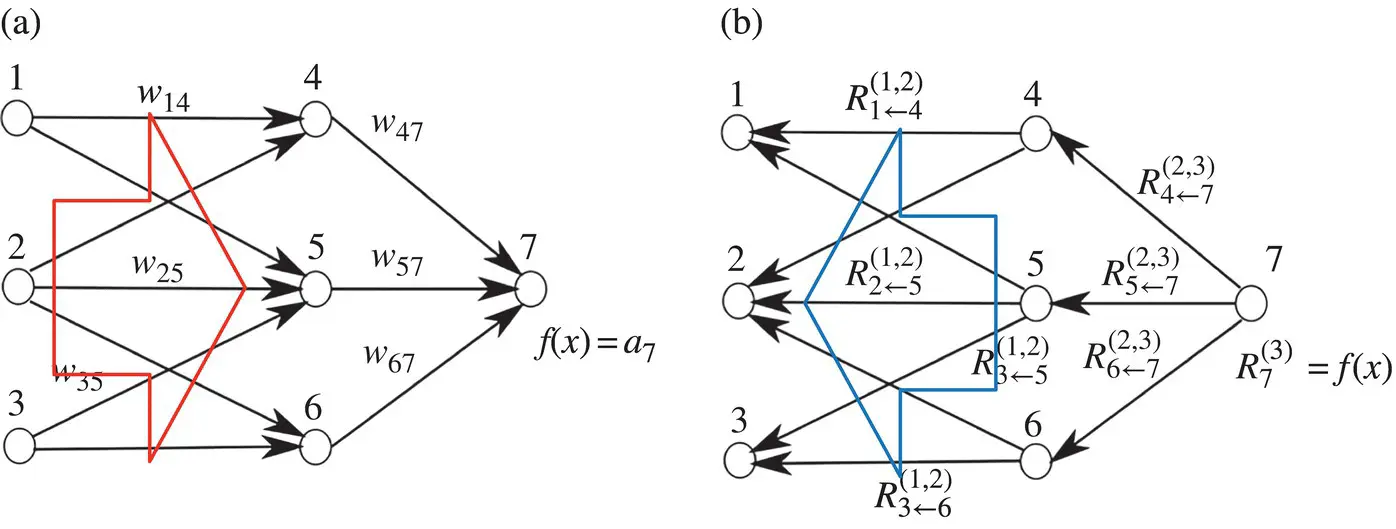
Figure 4.1 (a) Neural network (NN) as a classifier, (b) NN during the relevance computation.
For example,  Note that neuron 7 has no incoming messages anyway. Instead, its relevance is defined as
Note that neuron 7 has no incoming messages anyway. Instead, its relevance is defined as  . In Eq. (4.8)and the following text, the terms input and source have the meaning of being an input to another neuron in the direction defined during the time of classification, not during the time of computation of LRP. For example in Figure 4.1, neurons 1 and 2 are the inputs and source for neuron 4, while neuron 6 is the sink for neurons 2 and 3. Given the two assumptions encoded in Eq. (4.8), the LRP by Eq. (4.2)can be satisfied by the following sufficient condition:
. In Eq. (4.8)and the following text, the terms input and source have the meaning of being an input to another neuron in the direction defined during the time of classification, not during the time of computation of LRP. For example in Figure 4.1, neurons 1 and 2 are the inputs and source for neuron 4, while neuron 6 is the sink for neurons 2 and 3. Given the two assumptions encoded in Eq. (4.8), the LRP by Eq. (4.2)can be satisfied by the following sufficient condition:


 and
and  . In general, this condition can be expressed as
. In general, this condition can be expressed as
(4.9) 
The difference between condition (4.9)and definition (4.8)is that in condition (4.9)the sum runs over the sources at layer l for a fixed neuron k at layer l + 1, whereas in definition (4.8)the sum runs over the sinks at layer l + 1 for a fixed neuron i at a layer l . When using Eq. (4.8)to define the relevance of a neuron from its messages, then condition (4.9)is a sufficient condition I order to ensure that Eq. (4.2)holds. Summing over the left hand side in Eq. (4.9)yields
One can interpret condition (4.9)by saying that the messages  are used to distribute the relevance
are used to distribute the relevance  of a neuron k onto its input neurons at layer l . In the following sections, we will use this notion and the more strict form of relevance conservation as given by definition (4.8)and condition (4.9). We set Eqs. (4.8)and (4.9)as the main constraints defining LRP. A solution following this concept is required to define the messages
of a neuron k onto its input neurons at layer l . In the following sections, we will use this notion and the more strict form of relevance conservation as given by definition (4.8)and condition (4.9). We set Eqs. (4.8)and (4.9)as the main constraints defining LRP. A solution following this concept is required to define the messages  according to these equations.
according to these equations.
Интервал:
Закладка:
Похожие книги на «Artificial Intelligence and Quantum Computing for Advanced Wireless Networks»
Представляем Вашему вниманию похожие книги на «Artificial Intelligence and Quantum Computing for Advanced Wireless Networks» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.












Обсуждение, отзывы о книге «Artificial Intelligence and Quantum Computing for Advanced Wireless Networks» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.