Qing Li - Real-Time Concepts for Embedded Systems
Здесь есть возможность читать онлайн «Qing Li - Real-Time Concepts for Embedded Systems» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: San Francisco, Год выпуска: 2003, ISBN: 2003, Издательство: CMP books, Жанр: ОС и Сети, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Real-Time Concepts for Embedded Systems
- Автор:
- Издательство:CMP books
- Жанр:
- Год:2003
- Город:San Francisco
- ISBN:1-57820-124-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Real-Time Concepts for Embedded Systems: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Real-Time Concepts for Embedded Systems»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Delve into the details of real-time programming so you can develop a working knowledge of the common design patterns and program structures of real-time operating systems (RTOS). The objects and services that are a part of most RTOS kernels are described and real-time system design is explored in detail. You learn how to decompose an application into units and how to combine these units with other objects and services to create standard building blocks. A rich set of ready-to-use, embedded design “building blocks” is also supplied to accelerate your development efforts and increase your productivity.
Experienced developers new to embedded systems and engineering or computer science students will both appreciate the careful balance between theory, illustrations, and practical discussions. Hard-won insights and experiences shed new light on application development, common design problems, and solutions in the embedded space. Technical managers active in software design reviews of real-time embedded systems will find this a valuable reference to the design and implementation phases.
Qing Li is a senior architect at Wind River Systems, Inc., and the lead architect of the company’s embedded IPv6 products. Qing holds four patents pending in the embedded kernel and networking protocol design areas. His 12+ years in engineering include expertise as a principal engineer designing and developing protocol stacks and embedded applications for the telecommunications and networks arena. Qing was one of a four-member Silicon Valley startup that designed and developed proprietary algorithms and applications for embedded biometric devices in the security industry.
Caroline Yao has more than 15 years of high tech experience ranging from development, project and product management, product marketing, business development, and strategic alliances. She is co-inventor of a pending patent and recently served as the director of partner solutions for Wind River Systems, Inc. About the Authors
Real-Time Concepts for Embedded Systems — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Real-Time Concepts for Embedded Systems», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Table 11.3: Group 3 Operations.
| Typical Operations | Description |
|---|---|
| clock_get_time | Gets the current clock time, which is the current running value either from the system clock or from the real-time clock. |
Output Parameter:A time structure containing seconds, minutes, or hours [3] The time structure is implementation dependent. |
|
| clock_set_time | Sets the clock to a specified time. The new time is set either into the system clock or into the real-time clock. |
Input Parameter:A time structure containing seconds, minutes, or hours [3] The time structure is implementation dependent. |
11.8 Points to Remember
Some points to remember include the following:
· Hardware timers (hard timers) are handled within the context of the ISR. The timer handler must conform to general restrictions placed on the ISR.
· The kernel scheduler depends on the announcement of time passing per tick.
· Soft timers are built on hard timers and are less accurate because of various delays.
· A soft-timer handling facility should allow for efficient timer installation, cancellation, and timer bookkeeping.
· A soft-timer facility built using the timing-wheel approach provides efficient operations for installation, cancellation, and timer bookkeeping.
Chapter 12: I/O Subsystem
12.1 Introduction
All embedded systems include some form of input and output (I/O) operations. These I/O operations are performed over different types of I/O devices. A vehicle dashboard display, a touch screen on a PDA, the hard disk of a file server, and a network interface card are all examples of I/O devices found in embedded systems. Often, an embedded system is designed specifically to handle the special requirements associated with a device. A cell phone, pager, and a handheld MP3 player are a few examples of embedded systems built explicitly to deal with I/O devices.
I/O operations are interpreted differently depending on the viewpoint taken and place different requirements on the level of understanding of the hardware details.
From the perspective of a system software developer, I/O operations imply communicating with the device, programming the device to initiate an I/O request, performing actual data transfer between the device and the system, and notifying the requestor when the operation completes. The system software engineer must understand the physical properties, such as the register definitions, and access methods of the device. Locating the correct instance of the device is part of the device communications when multiple instances of the same device are present. The system engineer is also concerned with how the device is integrated with rest of the system. The system engineer is likely a device driver developer because the system engineer must know to handle any errors that can occur during the I/O operations.
From the perspective of the RTOS, I/O operations imply locating the right device for the I/O request, locating the right device driver for the device, and issuing the request to the device driver. Sometimes the RTOS is required to ensure synchronized access to the device. The RTOS must facilitate an abstraction that hides both the device characteristics and specifics from the application developers.
From the perspective of an application developer, the goal is to find a simple, uniform, and elegant way to communicate with all types of devices present in the system. The application developer is most concerned with presenting the data to the end user in a useful way.
Each perspective is equally important and is examined in this chapter. This chapter focuses on:
· basic hardware I/O concepts,
· the structure of the I/O subsystem, and
· a specific implementation of an I/O subsystem.
12.2 Basic I/O Concepts
The combination of I/O devices, associated device drivers, and the I/O subsystem comprises the overall I/O system in an embedded environment. The purpose of the I/O subsystem is to hide the device-specific information from the kernel as well as from the application developer and to provide a uniform access method to the peripheral I/O devices of the system. This section discusses some fundamental concepts from the perspective of the device driver developer.
Figure 12.1 illustrates the I/O subsystem in relation to the rest of the system in a layered software model. As shown, each descending layer adds additional detailed information to the architecture needed to manage a given device.
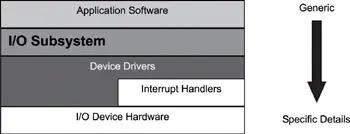
Figure 12.1: I/O subsystem and the layered model.
12.2.1 Port-Mapped vs. Memory-Mapped I/O and DMA
The bottom layer contains the I/O device hardware. The I/O device hardware can range from low-bit rate serial lines to hard drives and gigabit network interface adaptors. All I/O devices must be initialized through device control registers, which are usually external to the CPU. They are located on the CPU board or in the devices themselves. During operation, the device registers are accessed again and are programmed to process data transfer requests, which is called device control . To access these devices, it is necessary for the developer to determine if the device is port mapped or memory mapped. This information determines which of two methods, port-mapped I/O or memory-mapped I/O, is deployed to access an I/O device.
When the I/O device address space is separate from the system memory address space, special processor instructions, such as the IN and OUT instructions offered by the Intel processor, are used to transfer data between the I/O device and a microprocessor register or memory.
The I/O device address is referred to as the port number when specified for these special instructions. This form of I/O is called port-mapped I/O , as shown in Figure 12.2.
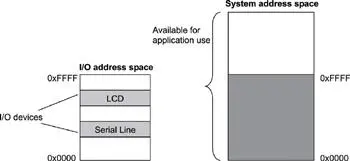
Figure 12.2: Port-mapped I/O.
The devices are programmed to occupy a range in the I/O address space. Each device is on a different I/O port. The I/O ports are accessed through special processor instructions, and actual physical access is accomplished through special hardware circuitry. This I/O method is also called isolated I/O because the memory space is isolated from the I/O space, thus the entire memory address space is available for application use.
The other form of device access is memory-mapped I/O, as shown in Figure 12.3. In memory-mapped I/O , the device address is part of the system memory address space. Any machine instruction that is encoded to transfer data between a memory location and the processor or between two memory locations can potentially be used to access the I/O device. The I/O device is treated as if it were another memory location. Because the I/O address space occupies a range in the system memory address space, this region of the memory address space is not available for an application to use.
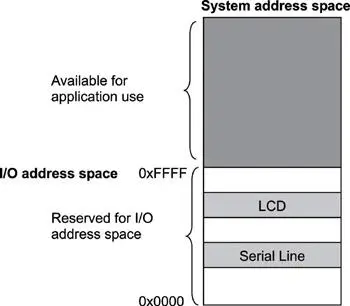
Figure 12.3: Memory-mapped I/O.
The memory-mapped I/O space does not necessarily begin at offset 0 in the system address space, as illustrated in Figure 12.3. It can be mapped anywhere inside the address space. This issue is dependent on the system implementation.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Real-Time Concepts for Embedded Systems»
Представляем Вашему вниманию похожие книги на «Real-Time Concepts for Embedded Systems» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.








Обсуждение, отзывы о книге «Real-Time Concepts for Embedded Systems» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.