Qing Li - Real-Time Concepts for Embedded Systems
Здесь есть возможность читать онлайн «Qing Li - Real-Time Concepts for Embedded Systems» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: San Francisco, Год выпуска: 2003, ISBN: 2003, Издательство: CMP books, Жанр: ОС и Сети, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Real-Time Concepts for Embedded Systems
- Автор:
- Издательство:CMP books
- Жанр:
- Год:2003
- Город:San Francisco
- ISBN:1-57820-124-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Real-Time Concepts for Embedded Systems: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Real-Time Concepts for Embedded Systems»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Delve into the details of real-time programming so you can develop a working knowledge of the common design patterns and program structures of real-time operating systems (RTOS). The objects and services that are a part of most RTOS kernels are described and real-time system design is explored in detail. You learn how to decompose an application into units and how to combine these units with other objects and services to create standard building blocks. A rich set of ready-to-use, embedded design “building blocks” is also supplied to accelerate your development efforts and increase your productivity.
Experienced developers new to embedded systems and engineering or computer science students will both appreciate the careful balance between theory, illustrations, and practical discussions. Hard-won insights and experiences shed new light on application development, common design problems, and solutions in the embedded space. Technical managers active in software design reviews of real-time embedded systems will find this a valuable reference to the design and implementation phases.
Qing Li is a senior architect at Wind River Systems, Inc., and the lead architect of the company’s embedded IPv6 products. Qing holds four patents pending in the embedded kernel and networking protocol design areas. His 12+ years in engineering include expertise as a principal engineer designing and developing protocol stacks and embedded applications for the telecommunications and networks arena. Qing was one of a four-member Silicon Valley startup that designed and developed proprietary algorithms and applications for embedded biometric devices in the security industry.
Caroline Yao has more than 15 years of high tech experience ranging from development, project and product management, product marketing, business development, and strategic alliances. She is co-inventor of a pending patent and recently served as the director of partner solutions for Wind River Systems, Inc. About the Authors
Real-Time Concepts for Embedded Systems — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Real-Time Concepts for Embedded Systems», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Part of the timer chip initialization involves installing an interrupt service routine (ISR) that is called when the timer interrupt occurs. Typically, the ISR performs these duties:
· Updating the system clock- Both the absolute time and elapsed time is updated. Absolute time is time kept in calendar date, hours, minutes, and seconds. Elapsed time is usually kept in ticks and indicates how long the system has been running since power up.
· Calling a registered kernel function to notify the passage of a preprogrammed period- For the following discussion, the registered kernel function is called announce_time_tick.
· Acknowledging the interrupt, reinitializing the necessary timer control register(s), and returning from interrupt.
The announce_time_tick function is invoked in the context of the ISR; therefore, all of the restrictions placed on an ISR are applicable to announce_time_tick. In reality, announce_time_tick is part of the timer ISR. The announce_time_tick function is called to notify the kernel scheduler about the occurrence of a timer tick. Equally important is the announcement of the timer tick to the soft-timer handling facility. These concepts are illustrated in Figure 11.3.
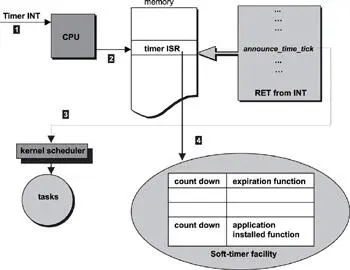
Figure 11.3: Steps in servicing the timer interrupt.
The soft-timer handling facility is responsible for maintaining the soft timers at each timer tick.
11.5 A Model for Implementing the Soft-Timer Handling Facility
The functions performed by the soft-timer facility, called the timer facility from now on, include:
· allowing applications to start a timer,
· allowing applications to stop or cancel a previously installed timer, and
· internally maintaining the application timers.
The soft-timer facility is comprised of two components: one component lives within the timer tick ISR and the other component lives in the context of a task.
This approach is used for several reasons. If all of the soft-timer processing is done with the ISR and if the work spans multiple ticks (i.e., if the timer tick handler does not complete work before the next clock tick arrives), the system clock might appear to drift as seen by the software that tracks time. Worse, the timer tick events might be lost. Therefore, the timer tick handler must be short and must be conducting the least amount of work possible. Processing of expired soft timers is delayed into a dedicated processing task because applications using soft timers can tolerate a bounded timer inaccuracy. The bounded timer inaccuracy refers to the imprecision the timer may take on any value. This value is guaranteed to be within a specific range.
Therefore, a workable model for implementing a soft-timer handling facility is to create a dedicated processing task and call it a worker task, in conjunction with its counter part that is part of the system timer ISR. The ISR counterpart is given a fictitious name of ISR_timeout_fn for this discussion.
The system timer chip is programmed with a particular interrupt rate, which must accommodate various aspects of the system operation. The associated timer tick granularity is typically much smaller than the granularity required by the application-level soft timers. The ISR_timeout_fn function must work with this value and notify the worker task appropriately.
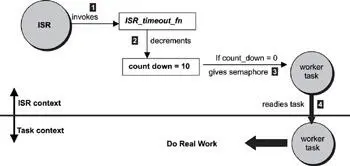
Figure 11.4: A model for soft-timer handling facility.
In the following example, assume that an application requires three soft timers. The timeout values equal 200ms, 300ms, and 500ms. The least common denominator is 100ms. If each hardware timer tick represents 10ms, then 100ms translates into a countdown value of 10. The ISR_timeout_fn keeps track of this countdown value and decrements it by one during each invocation. The ISR_timeout_fn notifies the worker task by a "give" operation on the worker task's semaphore after the countdown value reaches zero, effectively allowing the task to be scheduled for execution. The ISR_timeout_fn then reinitializes the countdown value back to 10. This concept is illustrated in Figure 11.4.
In the ISR-to-processing-task model, the worker task must maintain an application-level, timer-countdown table based on 100ms granularity. In this example, the timer table has three countdown values: 2, 3, and 5 representing the 200ms, 300ms, and the 500ms application-requested timers. An application-installed, timer-expiration function is associated with each timer. This concept is illustrated in Figure 11.5.
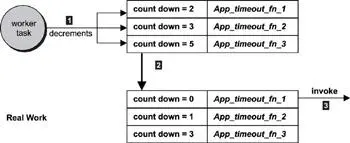
Figure 11.5: Servicing the timer interrupt in the task context.
The three soft timers, which are simply called timers unless specified otherwise, are decremented by the worker task each time it runs. When the counter reaches zero, the application timer has expired. In this example, the 200ms timer and the associated function App_timeout_fn_1, which the application installs, is invoked. As shown in Figures 11.4 and 11.5, a single ISR-level timer drives three application timers at the task-level, providing a good reason why these timers are called soft timers. The decrease in the number of ISR timers installed improves the overall system performance.
These application-installed timers are called soft timers because processing is not synchronized with the hardware timer tick. It is a good idea to explore this concept further by examining possible delays that can occur along the delivery path of the timer tick.
11.5.1 Possible Processing Delays
The first delay is the event-driven, task-scheduling delay. As shown in the previous example, the maintenance of soft timers is part of ISR_timeout_fn and involves decrementing the expiration time value by one. When the expiration time reaches zero, the timer expires and the associated function is invoked. Because ISR_timeout_fn is part of the ISR, it must perform the smallest amount of work possible and postpone major work to a later stage outside the context of the ISR. Typical implementations perform real work either inside a worker task that is a dedicated daemon task or within the application that originally installed the timer. The minimum amount of work completed within the ISR by the installed function involves triggering an asynchronous event to the worker task, which typically translates into the kernel call event_send, should one exist. Alternatively, the triggering can also translate into the release of a semaphore on which the worker task is currently blocked. The notification delay caused by event generation from the ISR to the daemon task is the first level of delay, as shown in Figure 11.6. Note that the hypothetical kernel function event_send and the semaphore release function must be callable from within an ISR.

Figure 11.6: Level 1 delays-timer event notification delay.
The second delay is the priority-based, task-scheduling delay. In a typical RTOS, tasks can execute at different levels of execution priorities. For example, a worker task that performs timer expiration-related functions might not have the highest execution priority. In a priority-based, kernel-scheduling scheme, a worker task must wait until all other higher priority tasks complete execution before being allowed to continue. With a round-robin scheduler, the worker task must wait for its scheduling cycle in order to execute. This process represents the second level of delay as shown in Figure 11.7.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Real-Time Concepts for Embedded Systems»
Представляем Вашему вниманию похожие книги на «Real-Time Concepts for Embedded Systems» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.








Обсуждение, отзывы о книге «Real-Time Concepts for Embedded Systems» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.