Qing Li - Real-Time Concepts for Embedded Systems
Здесь есть возможность читать онлайн «Qing Li - Real-Time Concepts for Embedded Systems» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: San Francisco, Год выпуска: 2003, ISBN: 2003, Издательство: CMP books, Жанр: ОС и Сети, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Real-Time Concepts for Embedded Systems
- Автор:
- Издательство:CMP books
- Жанр:
- Год:2003
- Город:San Francisco
- ISBN:1-57820-124-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Real-Time Concepts for Embedded Systems: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Real-Time Concepts for Embedded Systems»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Delve into the details of real-time programming so you can develop a working knowledge of the common design patterns and program structures of real-time operating systems (RTOS). The objects and services that are a part of most RTOS kernels are described and real-time system design is explored in detail. You learn how to decompose an application into units and how to combine these units with other objects and services to create standard building blocks. A rich set of ready-to-use, embedded design “building blocks” is also supplied to accelerate your development efforts and increase your productivity.
Experienced developers new to embedded systems and engineering or computer science students will both appreciate the careful balance between theory, illustrations, and practical discussions. Hard-won insights and experiences shed new light on application development, common design problems, and solutions in the embedded space. Technical managers active in software design reviews of real-time embedded systems will find this a valuable reference to the design and implementation phases.
Qing Li is a senior architect at Wind River Systems, Inc., and the lead architect of the company’s embedded IPv6 products. Qing holds four patents pending in the embedded kernel and networking protocol design areas. His 12+ years in engineering include expertise as a principal engineer designing and developing protocol stacks and embedded applications for the telecommunications and networks arena. Qing was one of a four-member Silicon Valley startup that designed and developed proprietary algorithms and applications for embedded biometric devices in the security industry.
Caroline Yao has more than 15 years of high tech experience ranging from development, project and product management, product marketing, business development, and strategic alliances. She is co-inventor of a pending patent and recently served as the director of partner solutions for Wind River Systems, Inc. About the Authors
Real-Time Concepts for Embedded Systems — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Real-Time Concepts for Embedded Systems», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Timers are an integral part of many real-time embedded systems. A timer is the scheduling of an event according to a predefined time value in the future, similar to setting an alarm clock.
A complex embedded system is comprised of many different software modules and components, each requiring timers of varying timeout values. Most embedded systems use two different forms of timers to drive time-sensitive activities: hard timers and soft timers. Hard timers are derived from physical timer chips that directly interrupt the processor when they expire. Operations with demanding requirements for precision or latency need the predictable performance of a hard timer. Soft timers are software events that are scheduled through a software facility.
A soft-timer facility allows for efficiently scheduling of non-high-precision software events. A practical design for the soft-timer handling facility should have the following properties:
· efficient timer maintenance, i.e., counting down a timer,
· efficient timer installation, i.e., starting a timer, and
· efficient timer removal, i.e., stopping a timer.
While an application might require several high-precision timers with resolutions on the order of microseconds or even nanoseconds, not all of the time requirements have to be high precision. Even demanding applications also have some timing functions for which resolutions on the order of milliseconds, or even of hundreds of milliseconds, are sufficient. Aspects of applications requiring timeouts with course granularity (for example, with tolerance for bounded inaccuracy) should use soft timers. Examples include the Transmission Control Protocol module, the Real-time Transport Protocol module, and the Address Resolution Protocol module.
Another reason for using soft timers is to reduce system-interrupt overhead. The physical timer chip rate is usually set so that the interval between consecutive timer interrupts is within tens of milliseconds or even within tens of microseconds. The interrupt latency and overhead can be substantial and can grow with the increasing number of outstanding timers. This issue particularly occurs when each timer is implemented by being directly interfaced with the physical timer hardware.
This chapter focuses on:
· real-time clocks versus system clocks,
· programmable interval timers,
· timer interrupt service routines,
· timer-related operations,
· soft timers, and
· implementing soft-timer handling facilities.
11.2 Real-Time Clocks and System Clocks
In some references, the term real-time clock is interchangeable with the term system clock. Within the context of this book, however, these terminologies are separate, as they are different on various architectures.
Real-time clocks exist in many embedded systems and track time, date, month, and year. Commonly, they are integrated with battery-powered DRAM as shown in Figure 11.1. This integrated real-time clock becomes independent of the CPU and the programmable interval timer, making the maintenance of real time between system power cycles possible.
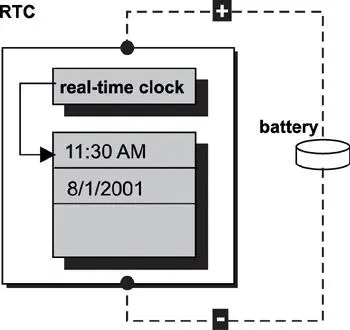
Figure 11.1: A real-time clock.
The job of the system clock is identical to that of the real-time clock: to track either real-time or elapsed time following system power up (depending on implementation). The initial value of the system clock is typically retrieved from the real-time clock at power up or is set by the user. The programmable interval timer drives the system clock, i.e. the system clock increments in value per timer interrupt. Therefore, an important function performed at the timer interrupt is maintaining the system clock, as shown in Figure 11.2.
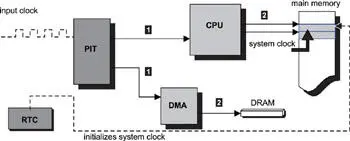
Figure 11.2: System clock initialization.
11.3 Programmable Interval Timers
The programmable interval timer (PIT), also known as the timer chip, is a device designed mainly to function as an event counter, elapsed time indicator, rate-controllable periodic event generator, as well as other applications for solving system-timing control problems.
The functionality of the PIT is commonly incorporated into the embedded processor, where it is called an on-chip timer . Dedicated stand-alone timer chips are available to reduce processor overhead. As different as the various timer chips can be, some general characteristics exist among them. For example, timer chips feature an input clock source with a fixed frequency, as well as a set of programmable timer control registers. The timer interrupt rate is the number of timer interrupts generated per second. The timer interrupt rate is calculated as a function of the input clock frequency and is set into a timer control register.
A related value is the timer countdown value , which determines when the next timer interrupt occurs. It is loaded in one of the timer control registers and decremented by one every input clock cycle. The remaining timer control registers determine the other modes of timer operation, such as whether periodic timer interrupts are generated and whether the countdown value should be automatically reloaded for the next timer interrupt.
Customized embedded systems come with schematics detailing the interconnection of the system components. From these schematics, a developer can determine which external components are dependent on the timer chip as the input clock source. For example, if a timer chip output pin interconnects with the control input pin of the DMA chip, the timer chip controls the DRAM refresh rate.
Timer-chip initialization is performed as part of the system startup. Generally, initialization of the timer chip involves the following steps:
· Resetting and bringing the timer chip into a known hardware state.
· Calculating the proper value to obtain the desired timer interrupt frequency and programming this value into the appropriate timer control register.
· Programming other timer control registers that are related to the earlier interrupt frequency with correct values. This step is dependent on the timer chip and is specified in detail by the timer chip hardware reference manual.
· Programming the timer chip with the proper mode of operation.
· Installing the timer interrupt service routine into the system.
· Enabling the timer interrupt.
The behavior of the timer chip output is programmable through the control registers, the most important of which is the timer interrupt-rate register (TINTR), which is as follows:
TINTR = F(x)
where x = frequency of the input crystal
Manufacturers of timer chips provide this function and the information is readily available in the programmer's reference manual.
The timer interrupt rate equals the number of timer interrupt occurrences per second. Each interrupt is called a tick, which represents a unit of time. For example, if the timer rate is 100 ticks, each tick represents an elapsed time of 10 milliseconds.
The periodic event generation capability of the PIT is important to many real-time kernels. At the heart of many real-time kernels is the announcement of the timer interrupt occurrence, or the tick announcement , from the ISR to the kernel, as well as to the kernel scheduler, if one exists. Many of these kernel schedulers run through their algorithms and conduct task scheduling at each tick.
11.4 Timer Interrupt Service Routines
Интервал:
Закладка:
Похожие книги на «Real-Time Concepts for Embedded Systems»
Представляем Вашему вниманию похожие книги на «Real-Time Concepts for Embedded Systems» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.








Обсуждение, отзывы о книге «Real-Time Concepts for Embedded Systems» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.